 Gebärdensprache
Gebärdensprache
 Leichte Sprache
Leichte Sprache


Winner 2017
Mittelpunkt Mensch

(f.l.t.r.) Dipl.-Inf. (FH) Sven Parusel, Prof. Dr.-Ing. Sami Haddadin, dr. med. (Univ. Debrecen) Simon Haddadin

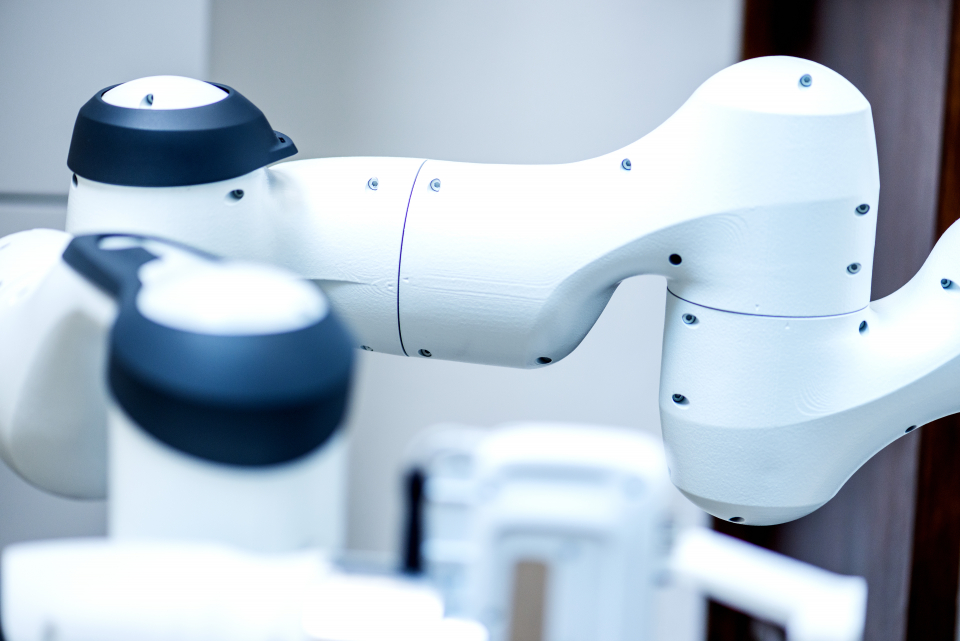
Prof. Dr.-Ing. Sami Haddadin, dr. med (Univ. Debrecen) Simon Haddadin and Dipl.-Inf. (FH) Sven Parusel have an answer. The three scientists developed a sensitive and intuitive robot as the basis for many new automation engineering applications. The affordable system can be linked digitally and makes cooperation between man and machine safe - in industry and in the home. Sami Haddadin is the Director of the Institute of Automatic Control at Leibniz Universität Hannover - and was recently appointed Professor of Robotics and System Intelligence at the Technical University Munich (TUM). Sven Parusel is chief engineer at FRANKA EMIKA GmbH which Simon Haddadin heads as Managing Director. All three nominees pursued research for many years at the Institute of Robotics and Mechatronics at the German Aerospace Center DLR.

Before robots can be used in the future for a number of the tasks performed by humans today and easily operated, new technical concepts are needed. The automated machines used in manufacturing in the past are expensive, difficult to program and inflexible since they always only strictly complete set tasks. To prevent accidents, robots and humans are often separated by protective barriers. The robot developed by the nominated team, however, is designed to serve humans as a true mechanical assistant and work with 'their' human as a team without separating safety guards.




more details
Resumes

Prof. Dr.-Ing. Sami Haddadin
- 26.06.1980
- born in Neustadt am Rübenberge, Lower Saxony, Germany
- 1999
- Abitur Gymnasium Stolzenau, Lower Saxony, Germany
- 1999
- Academic language and admission course at University of Reading, UK
- 1999 – 2001
- Diplom program Electrical Engineering at the University of Hanover, Germany
- 2000
- Basic traineeship in Electrical Engineering at Dauerstahl, Dohle & Co. KG, Garbsen, Germany
- 2000 – 2001
- Working student at University of Hanover/KBS, Hanover, Germany
- 2001
- Traineeship at VMT (Vision Machine Technic), Weinheim, Germany
- 2001 – 2006
- Diplom program Computer Science with minor Medical Computer Science at the Distance University of Hagen, Germany
- 2001 – 2002
- Erasmus scholar in Electrical Engineering at the University of Oulu, Finland
- 2002 – 2003
- Working student at Technical University of Munich, Munich, Germany
- 2002 – 2005
- Diplom program Electrical Engineering at the Technical University of Munich, Germany
(Degree: Dipl.-Ing. (German M.Sc.) Electrical Engineering with honours) - 2003 – 2005
- Working student at Infineon Technologies AG, Munich, Germany
- 2005 – 2008
- Elite Graduate Program Technology Management at the Center for Digital Technology and Management, Technical University of Munich, Ludwig Maximilian University Munich & Elite Network Bavaria, Germany (Degree: Honours Degree Technology Management)
- 2006 – 2009
- Master program Informatics at the Technical University of Munich, Germany (Degree: M.Sc. Informatics - honours with distinction)
- 2006 – 2010
- Junior Scientist at Robotics and Mechatronics Center led by Prof. Dr.-Ing. Gerd Hirzinger, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 2006 – 2011
- Dissertation at RWTH Aachen, Germany
passed with highest distinction summa cum laude
Committee: Univ.-Prof. Dr.-Ing. Jürgen Roßmann, Hon.-Prof. Dr.-Ing. Gerd Hirzinger
Title: "Towards Safe Robots: Approaching Asimov’s 1st Law" - 2010 – 2013
- Lecturer at Technical University of Munich, Munich, Germany
- 2010 – 2011
- Coordinator “Human-Robot Interaction” at Robotics and Mechatronics Center led by Prof. Dr.-Ing. Gerd Hirzinger, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 2011
- Visiting Researcher at Stanford University with Prof. Oussama Khatib, Palo Alto, USA
- 2011
- Visiting Researcher at Willow Garage, Menlo Park, USA
- 2011 – 2012
- Group Leader “Human-Robot Interaction” at Robotics and Mechatronics Center, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 2012 – 2013
- Research consultant at Willow Garage, Menlo Park, USA
- 2012 – 2014
- Scientific Coordinator “Human-Centered Robotics” at Robotics and Mechatronics Center, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 2013 – 2014
- Program Coordinator “Terrestrial Assistance Robotics” at Robotics and Mechatronics Center led by Prof. Dr.-Ing. Gerd Hirzinger / Prof. Dr.-Ing. Alin Albu-Schäffer, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 2012 – 2014
- CEO & Founder of Kastanienbaum GmbH, Munich, Germany
- 2014 – 2016
- CEO & Founder of KBee AG, Munich, Germany
- 2014 - 2017
- Appointed Full Professor (W3) at Institute of Automatic Control (IRT), Leibniz Universität Hannover, Hannover, Germany
- since 2015
- Evaluator/reviewer (Fachgutachter) DFG, BMBF, European Research Council
- 2017
- Stanford University, Palo Alto, California, USA, Appointed Associate Professor, Declined
- 2017
- Massachusetts Institute of Technology, Cambridge, Massachusetts, USA, Appointed Associate Professor, Declined
- since 2018
- Appointed Full Professor (W3) at Chair of Robotics Science and Systems Intelligence, Technical University of Munich, Munich, Germany
- since 2018
- Appointed Director Munich School of Robotics, Technical University of Munich, Munich, German
Further Occupations
- since 2006
- International reviewer and editor at the major robotics book publications (Handbook of Robotics), journals (IJRR, TRO, RAM, IFAC…) and conferences (IEEE ICRA, IEEE/RSJ IROS, RSS)
- since 2006
- Organizer and committee member at the major international robotics conferences IEEE ICRA, IEEE/RSJ IROS, RSS, HUMANOIDS, IFAC, Robio, …
- since 2008
- Member of IEEE
- since 2011
- International evaluator/reviewer Volkswagen Foundation, Italian Ministry of Education, University and Research, Luxembourg National Research Fund, Schweizer Nationalfonds, National Science Foundation, Agence Nationale de la Recherche
- 2007 – 2011
- DIN representative and committe member: ISO Working Group (WG) 7, Personal care robot
- since 2014
- Member of euRobotics aisbl
- since 2016
- Member of the Board, Center for Systems Neuroscience, Hanover, Germany
- since 2017
- Member of the Board, Robotics & AI Law Society e.V. (RAILS)
- since 2017
- Member Wissenschaftlichen Gesellschaft für Montage, Handhabung und Industrierobotik (MHI)
- since 2005
- Several European Projects such as NEUROBOTICS, PHRIENDS, SMEROBOT, VIACTORS, SAPHARI, EUROC, SoftPro, ILIAD
Program Committee: 2017 International Symposium of Robotics Resarch (ISRR), Puerto Varas, Chile
Research Interests:
Mechatronic robot design
Human-Robot Interaction
Nonlinear control
Task, motion and reflex planning
Robot learning and optimal control
Human motor control
Neural control of assistive devices
Intelligent prosthetics
Humanoids
Safe Robots
Publications
- More than 140 publications in the top international robotics journals, conferences and books
1 Book
Honors & Awards
- 2007
- Winner: International Conference on Robotics and Automation (ICRA 2007): Best Video Award
- 2008
- Winner: Honours of the Elitenetwork Bavaria in Techology Management
- 2008
- Winner: Industrial Robot Journal: 2008 Literati Best Paper Award
- 2008
- Winner: International Conference on Intelligent Robots and Systems (IROS 2008): Best Application Paper Award
- 2009
- Winner: International Conference on Robotics and Automation (ICRA 2009): Best Service Robotics Paper Award
- 2009
- Finalist: Robotdalen Scientific Award 2009, “Honorable Mention”
- 2010
- Winner: 3rd place Walter Reis Innovation Award 2010
- 2010
- Finalist: IROS 2010: Finalist Best Application Paper Award
- 2011
- Winner: euRobotics Technology Transfer Award 2011 (DLR LWR-Team & KUKA LWR-Team)
- 2011
- Dr.-Ing. with highest distinction summa cum laude at RWTH Aachen, Germany
- 2011
- Winner: King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award (best journal publication 2011 in robotics)
- 2012
- Winner: Euron George Giralt PhD Award (best European dissertation in robotics)
- 2012
- Finalist: SfN BCI Award
- 2012
- Winner: IROS Best Jubilee Video Award
- 2012
- Winner: IROS Best Video Award
- 2013
- Winner: Martin Research Prize in Basic Research (awarded by Boston General Hospital & Harvard Medical School)
- 2013
- Borchers Plaque of RWTH Aachen
- 2013
- Winner: King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award (best journal publication 2013 in robotics)
- 2013
- Nominee: Falling Walls Science Startup of the Year
- 2014
- Nominee: AAAI Best Robot Video Award
- 2015
- Invitee German American Frontiers of Engineering, GAFOE 2015 of National Academy of Engineering of the National Academies & Alexander von Humboldt Foundation
- 2015
- Winner: Landmarks in “Germany - Land of Ideas” initiative
- 2015
- Winner: IEEE/RAS Early Career Award
- 2015
- Winner: RSS Early Career Spotlight Talk
- 2015
- Winner: Alfried Krupp Prize for Young Professors
- 2015
- Capital „Junge Elite” 2015 Outstanding Talents under 40, category Society and Science
- 2016
- 3rd place: euRobotics Technology Transfer Award 2016 (Kastanienbaum & DLR-Team)
- 2016
- Capital „Junge Elite” 2016 Outstanding Talents under 40
- 2017
- FRANKA EMIKA „2017 Top Tech to Watch “ in IEEE Tech Review

dr. med. (Univ. Debrecen) Simon Haddadin
- 05.03.1986
- born in Bad Oeynhausen, NRW
- 1992 – 2000
- Elementary and High School Stolzenau
- 2000 – 2005
- Geschwister-Scholl High School, Berenbostel
- 2005 – 2006
- Military service with Air Transport Squadron 62
- 2006
- Mathematics and physics studies at Leibniz University Hanover
- 2006 – 2012
- Medical studies at University Debrecen, Hungary
- 2010
- United States Medical Licensing Exam
- 2012
- Dissertation to medical doctor with excellence at the Institute of Pathology and Neuropathology with Prof. Peter Molnar
- 2010 – 2013
- Research scientist at German Aerospace Center (DLR), Institute of Robotics and Mechatronics with Prof. Dr.-Ing. Gerd Hirzinger
- 2012 – 2016
- PhD student at Technical University Munich, Graduate School of Bioengineering with PD Dr. Rainer Burgkart
- 2012
- Co-founder of the DLR Spin-off Kastanienbaum GmbH
- 2013 – 2014
- Research assistant and resident at Hanover Medical School, Traumatological Clinic with Prof. Dr. med. Christian Krettek
- 2015
- Study physician at Municipal Hospital Munich in Schwabing, Clinic for Hematology, Oncology and Immunology with Prof. Dr. med. Clemens-Martin Wendtner
- Since 2016
- Co-founder and CEO of FRANKA EMIKA GmbH
Further
- 2008 – 2012
- Scholarships for outstanding results of the University Debrecen
- 2011 - 2015
- SAPHARI: Safe and Autonomous Physical Human Aware Interaction, European Integrated Project (FP7)
- 2013 – 2016
- Helmholtz Validation Fund’s project „RACE-Lab“ – development of certifiable robot skills
- 2014
- Nominated at the Falling Walls Science Start-Up of the Year
- 2015
- Third winner of the euRobotics TechTransfer Award
- Since 2016
- Applicant and project lead of „//iSTRAP“ – intelligent and standardized robot apps for FRANKA EMIKA with the Bavarian Ministry of Economics
- Since 2017
- Project ROBINA – robot assisted services for an individualized and resource oriented intensive and palliative care for people with ALS
- 2017
- FRANKA EMIKA „2017 Top Tech to Watch “ in IEEE Tech Review
Exp. 2017 Project lead of “KoBo34“ – intuitive interaction with cooperative assistive robots for people in the 3. and 4. live stage with the federal ministry of science and education
Publications and patents
- 15 national and international publications in journals an das conference talks
10 national and international patents

Dipl.-Inf. (FH) Sven Parusel
- 14.01.1985
- Born in Kempten (Allgäu)
- 1991 - 1994
- Elementary school Haubenschloß, Kempten (Allgäu)
- 1994 - 1997
- Elementary school, Sonthofen
- 1997 - 2001
- Middle school, Sonthofen
- 2001 - 2004
- Technical secondary school, Sonthofen
- 2001 - 2002
- Internship at Robert Bosch GmbH, Immenstadt
- 2002
- Internship at Elektro Köberle e. K., Burgberg
- 2004 - 2009
- Study of computer science at the University of Applied Sciences Kempten, specialization in practical computer science, Dipl.-Inf. (FH)
- 2005 – 2007
- Internship at ATRIVIO GmbH, Kempten
- 2005 - 2016
- Self-employed Softwaredeveloper / Webdeveloper
- 2009 - 2014
- Research assistant at the German Aerospace Center (DLR), Institute of Robotics and Mechatronics, Oberpfaffenhofen with Dr.-Ing. Sami Haddadin
- 2012
- Founding of Kastanienbaum GmbH, München
- since 2012
- Chief Technology Officer at Kastanienbaum GmbH, München
- 2014
- Founding of KBee AG, München
- 2014 - 2016
- Chief Engineer at KBee AG, München
- 2016
- Founding of FRANKA EMIKA GmbH, München
- since 2016
- Chief Engineer at FRANKA EMIKA GmbH, München
Further functionings
- 2011 - 2015
- SAPHARI:Safe and Autonomous Physical Human Aware Interaction, European Integrated Project (FP7)
- 2015 - 2016
- Projectlead RACE-Lab: Robot Application Creator, supported by Helmholtz Validation Fund
Honours
- 2010
- Finalist: IROS 2010 Best Application Paper Award
- 2011
- King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award
- 2013
- Nominee: 2013 Falling Walls Science Startup of the Year
- 2014
- Nominee: 2014 AAAI Best Robot Video Award
Contact
Spokesperson
Prof. Dr.-Ing. Sami Haddadin
Institut für Reglungstechnik
Leibniz Universität Hannover
Appelstraße.11
30167 Hannover
Phone: + 49 (0) 511 / 76 24 523
E-Mail: Sami.haddadin@irt.uni-hannover.de
www.irt.uni-hannover.de
Press
dr. med. (Univ. Debrecen) Simon Haddadin
Geschäftsführer
FRANKA EMIKA GmbH
Infanteriestraße 19, Geb.3
80797 München
Phone: + 49 (0) 89 / 20 06 06 026
Fax: + 49 (0) 89 / 20 06 06 921
E-Mail: simon.haddadin@franka.de
www.franka.de
www.facebook.com/frankaemika/
www.twitter.com/FRANKAEMIKA
Mechtild Freiin v. Münchhausen, M.A.
Leiterin Referat für Kommunikation und Marketing
Pressesprecherin
Leibniz Universität Hannover
Welfengarten 1
30167 Hannover
Phone: + 49 (0) 511 / 76 25 355
Fax: + 49 (0) 511 / 76 25 391
Mobile: + 49 (0) 177 / 37 34 026
E-Mail: vonMuenchhausen@zuv.uni-hannover.de
www.uni-hannover.de
A description provided by the institutes and companies regarding their nominated projects
Robotics will substantially and sustainably impact our world, becoming one of the future central societal topics. Nowadays, however, it is only accessible to a limited number of people. High costs, complex programming and operation, as well as basic technological restrictions, which – among others – lead to absolute separation of robots and humans by safety fences which seem to be impregnable hurdles. How can such a complex technology be made available to the general public or even to manufacturers in developing let alone third world countries?
State of the art robotics technology has essentially been stagnating over the past 30 years. It offers solutions that are remote from humans, extremely expensive and non-flexible, suitable only for precise positioning (e.g. setting spot welds), programmed to predefined paths (e.g., painting) behind safety fences. However, originally, robots should – fundamental ideas can even be traced back to universal scholars like Leonardo Da Vinci or Gottfried Wilhelm Leibniz – support humans and free them from burdening or slave labor, which is reflected already in the Western Slavic notion “robota” (drudgery, respectively its original meaning work). For this, robots have to be affordable, flexible, and scalable. Technically speaking, this means that they must be easy to use and suitable for a multitude of tasks. In addition, already known solutions have to be adaptable and applicable to different but somewhat similar problems. In the upcoming years the Nominees aim to bring robotics back to the aforementioned original goal.
Inspired and guided by this vision, Prof. Dr.-Ing. Sami Haddadin, dr. med. (Univ. Debrecen) Simon Haddadin and Dipl.-Inf. Sven Parusel conducted pioneering basic research at the renowned Institute of Robotics and Mechatronics at DLR, followed by a technology transfer and development in a jointly founded start-up. The ultimate goal was to develop the first system of a completely new robot generation - affordable, safe, intelligent – an actively supporting tool for humans. It was initially designed as a factory assistant, evolving into a service robot for supporting elderly and sick persons, and, finally, a helper in our daily live.
At the Hannover Fair 2017 FRANKA EMIKA presented its “Power tool” Panda. This system was designed based on a worldwide unique robotic technology fully developed in Germany, and is now manufactured in Bavaria. Via the use of robot apps the system is as easy to handle as a smartphone, allowing even users with no previous knowledge in robotics to teach it new complex tasks within a couple of minutes. Its outstanding sensitivity allows the system to safely work side by side with humans and learn from them.
The significance of the ultra-lightweight, modular FRANKA EMIKA technology in robotics can be compared to the introduction of PCs and Apps at their time. To interact with the real world, the system is based on new sensitive sensors embedded into each joint, technically imitating the human muscular apparatus. This high sensitivity enables compliance and reactivity via an artificial central nervous system, as well as a learning ability of sensorimotoric skills due to novel machine learning algorithms. Furthermore, collective learning of interconnected robot systems became possible for the first time, i,e., the systems can learn from each other. In order to be able to control new characteristics such as sensitivity, interconnectivity and learning, the Nominees have also developed a new programming and interaction paradigm. The human becomes the teacher of the robotic co-worker, making it a useful and effective tool responding to his or her needs. In recently launched projects, these robot assistants will be used in disabled workshops as well as for helping people suffering from amyotrophic lateral sclerosis (ALS).
The necessity for our society to extensively use smart assistive systems in order to master challenges such as the demographic change, worldwide competition, or the rising product and service individualization is evident. The ever-increasing number of elderly people makes it almost impossible to support them with dignity and diligence and let them have a satisfying future in their own homes, taking into account the significant lack of qualified personnel. In order to overcome this problem, the Nominees currently develop the personal robot GARMI based on their FRANKA EMIKA technology, which will help preserve autonomy for the elderly and help relieve nurses and caregivers from burdensome work. Within the framework of a long-term project in cooperation with the market town Garmisch-Partenkirchen, this development is sought to have worldwide impact also by designing and implementing pilot apartments in nursing homes that are equipped with GARMI systems.
Furthermore, the Nominees currently work on using this new robotic technology to develop the next generation arm prostheses, which are nowadays still rather simple mechanical gripping devices than capable upper limb substitutes for everyday life. The novel affordable arm prosthesis myLimb that is currently undergoing a thorough testing phase has already shown promising results. It is equipped with previously unknown human-like sensitivity and protective reflexes. myLimb makes use of its built-in learning algorithms to acquire new skills. In symbiosis with the app concept this facilitates the ease of use of the system. New users were able to quickly perform even bimanual manipulation tasks without lengthy trainings. Such level of autonomy-based usability of prostheses allows also preventing users for harmful situations such as e.g. accidentally touching a heated hotplate.
The Nominees want to make their technology accessible to all members of society. This explains also their major focus on working with children and teenagers, the robonatives, who will establish a new societal epoch similarly to the Digital Natives. This robonatives generation can ensure that the symbiosis of German engineering and state-of-the-art computer science makes robotics a key technology of our society. For this, the simple and free access to the ecosystem via FRANKA World as well as the earliest possible training of young people at FRANKA Academy are crucial. The results will be unprecedented opportunities for added value, as robot apps can be developed by start-ups, students or hobbyists with almost no investment, creating new commercial and non-commercial applications. Above all, small and medium-sized enterprises can also benefit greatly from the access to such systems and even increase their national and international competitiveness.
The Nominees have been working together for more than a decade on the realization of their vision. Sami Haddadin is the Director of the Institute of Automatic Control at Leibniz University Hannover (LUH) and has recently accepted to become Professor of Robotics Science and System Intelligence at Technical University of Munich (TUM) after having declined offers from Stanford University and MIT. He was also appointed as Founding Director of the TUM "Munich School of Robotics". Simon Haddadin is the CEO of FRANKA EMIKA GmbH, headquartered in Munich, where Sven Parusel is Head of the Software and Control Department as Chief Engineer. Currently, FRANKA EMIKA GmbH has more than 80 employees at its Research and Development Center in Munich, which is expanded monthly by international talents, attracting experts from all over the world. Starting September 2017, the system will be shipped to the research community, to serve as a reference platform for worldwide robotics research. The production site is currently home to about 40 employees and has already been designed to produce 300 systems a week. International development, support, sales and production sites are in advanced planning and will be launched beginning of next year focusing on manufacturers of consumer electronics such as PCs, smartphones, etc., as well as professional end devices as medical devices. In the long run, the Nominees expect a market share of 10-20% in a world where over 25 million such assistive systems will be deployed over the next decade.
The right to nominate outstanding achievements for the Deutscher Zukunftspreis is incumbent on leading German institutions in science and industry as well as foundations.
The project "Human-centered robotic assistants for a brighter future" was submitted by acatech - the national academy of science and engineering, and the German Patent and Trademark Office DPMA as well as the German Rectors' Conference HRK.
