 Gebärdensprache
Gebärdensprache
 Leichte Sprache
Leichte Sprache


Preisträger 2017
Mittelpunkt Mensch

(v.l.n.r.) Dipl.-Inf. (FH) Sven Parusel, Prof. Dr.-Ing. Sami Haddadin,
dr. med. (Univ. Debrecen) Simon Haddadin

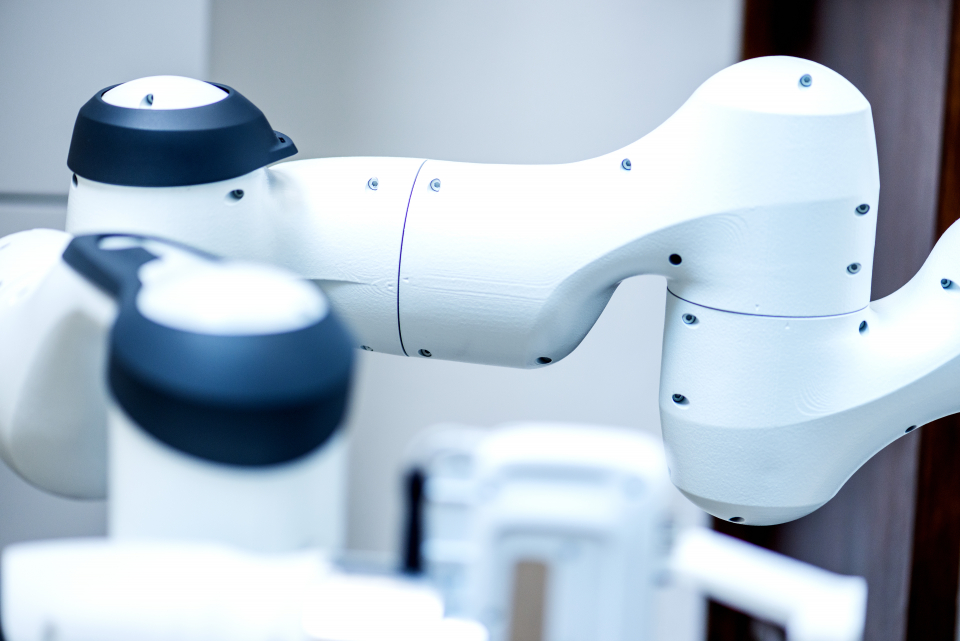
Die Antwort darauf geben Prof. Dr.-Ing. Sami Haddadin, dr. med. (Univ. Debrecen) Simon Haddadin und Dipl.-Inf. (FH) Sven Parusel. Die drei Forscher entwickelten einen sensiblen und intuitiv bedienbaren Roboter als Basis für viele neue Anwendungen der Automatisierungstechnik. Das kostengünstige System ist digital vernetzbar und ermöglicht eine sichere Kooperation von Menschen und Maschinen – in der Industrie und im privaten Umfeld. Sami Haddadin ist Direktor am Institut für Regelungstechnik der Leibniz Universität Hannover – und wurde kürzlich als Professor für Robotik und Systemintelligenz an die Technische Universität München berufen. Sven Parusel ist „Chief Engineer“ bei der FRANKA EMIKA GmbH, die Simon Haddadin als Geschäftsführer leitet. Alle drei Nominierten haben zuvor jahrelang am Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) geforscht.

Damit Roboter künftig für eine Vielzahl von Aufgaben einsetzbar sind und sich von jedermann leicht bedienen lassen, sind neue technische Konzepte erforderlich. Denn die bislang in der Fertigung eingesetzten Automaten sind teuer, schwierig zu programmieren und unflexibel, da sie stets nur strikt die vorgegebenen Aufgaben abarbeiten. Um Unfälle zu vermeiden, werden Roboter und Menschen durch eine Absperrung voneinander getrennt. Der von dem nominierten Team entwickelte Roboter hingegen ist dafür konzipiert, Menschen als echter maschineller Assistent zu dienen und ohne trennenden Schutzzaun mit ihnen zusammenzuarbeiten.
Inhalt konnte nicht geladen werden
Bitte ändern Sie ihre Privatsphäreneinstellung und aktivieren sie die Kategorie "Externe Inhalte"
Jetzt ändernDeutscher Zukunftspreis 2017 Erklärfilm ZDF Team 2
Endlich sollen die Menschen wieder in den Vordergrund rücken.
Prof. Dr.-Ing. Sami Haddadin

Fragen an die Nominierten
Ihre Innovation ist der Ausblick in die „schöne neue digitale Welt“. Sie habe haben ein Robotersystem entwickelt, das dem Menschen bei der Bewältigung alltäglicher Probleme helfen kann, seien es nun komplexe Montageabläufe oder Hilfeleistungen für ältere Menschen. Können Sie uns bitte die Schritte der Entwicklung aufzeigen? Wie kam es von der Idee zur Erfindung und schließlich zur Innovation?
Prof. Dr.-Ing. Sami Haddadin
Wir haben große Teile der Grundlagenforschung noch in unserer Zeit am Deutschen Zentrum für Luft- und Raumfahrt (DLR) erarbeitet. Die Fragen lauteten damals: Wie muss der ideale Roboter aussehen? Welche Fähigkeiten sollte er haben? Wie kann man ihn bauen? Welche Sensorik sollen wir ihm geben, beziehungsweise können wir ihm eine Feinfühligkeit, die der menschlichen ähnlich ist, geben? Wir haben daraufhin einen Roboter entwickelt, der durch seinen künstlichen Tastsinn fühlen kann, den man bei der Hand nehmen kann, der sogar vom Menschen selbstständig lernen kann. Das ist der Kern unserer Arbeit. Dann kamen weitere Fragen hinzu: Diese intelligenten autonomen oder teilautonomen Systeme, die wie Werkzeuge fungieren sollen, müssen von jedermann programmiert werden können. Wie muss dafür die Software ausgelegt werden – von den mathematischen Grundlagen bis hin zu den Algorithmen, um diese komplexen Systeme überhaupt programmieren und regeln zu können? Zu den Grundlagenarbeiten gehörte auch die Frage, wie sich diese Roboter so sicher machen lassen, dass man sie aus ihrer Schutzzone herauslassen kann. Wie kann man Issac Asimovs berühmte Forderung „Ein Roboter darf dem Menschen keinen Schaden zufügen“ in die Realität umsetzen? Die grundlegende Technologie zu schaffen, die diesen Anforderungen genügen kann, war der große erste Schritt unserer Innovation.
Der nächste Schritt war dann die Entwicklung der ersten Reihe an Prototypen. In dieser Phase haben wir uns ganz praktische Fragen gestellt: Wie kann man komplexe Weltraumtechnologie in reale Systeme und in ein entsprechendes Produkt umsetzen? Wie müssen diese Systeme gebaut werden, und wo können sie gebaut werden? Am Schluss kam dann die Umsetzung des ersten Systems seiner Art, das ich mittlerweile „Netbot“ nenne. Ein Netbot ist ein interaktiver, vernetzter Assistent, der von jedermann programmiert und benutzt werden kann.
Wie lange hat dieser Prozess gedauert – von den ersten Überlegungen bis zum vorzeigbaren Produkt?
Prof. Dr.-Ing. Sami Haddadin
Etwa zehn Jahre, so viel Zeit muss man veranschlagen.
Haben Sie beide als Brüder von Anfang an zusammengearbeitet?
Prof. Dr.-Ing. Sami Haddadin
Nicht von Anfang an, viele der Fragen wurden schon vorher aufgeworfen. Aber ich habe dann im Rahmen der Fragestellung, ob und wie ein Roboter sicher für den Umgang mit dem Menschen gemacht werden kann, immer wieder den Rat meines Vaters und dann auch meines Bruders gesucht. Er war damals ein sehr guter Medizinstudent und hatte schon enorm viel relevantes Wissen für diese neuen Forschungsthemen.
Also gab es ein brüderliches Gespräch, das Sie beide bewogen hat, sich mit der Materie zu beschäftigen …
dr. med. (Univ. Debrecen) Simon Haddadin
Ja, das war, glaube ich, beim Weihnachtsessen 2008. Es ging damals um die Kollisionsdetektion meines Bruders, die es ermöglicht hat, dass Roboter bei unvorhergesehenem Kontakt stehen bleiben und so den Menschen nicht verletzt – das war einer der großen Durchbrüche. Dabei kam die Frage auf, wie man so etwas beweisen kann. Und da bin eben ich als Mediziner gefragt. Es ist eine Frage der statistischen Relevanz, und so sind wir zusammengekommen. Ich habe dann ebenfalls beim DLR angefangen, und dabei habe ich Sven kennengelernt. Sven und ich haben mehrere Jahre mehr oder weniger in einem Keller verbracht, wo wir Reihen an Kollisionsversuchen durchgeführt haben, um herauszufinden, wo die Grenze zwischen Gefahr und Nicht-Gefahr für den Menschen verläuft. Hieraus ist dann auch meine Dissertation entstanden.
Dipl.-Inf. (FH) Sven Parusel
Ich bin im Zuge meiner Diplomarbeit dazugekommen. 2008 habe ich eine Stelle dafür gesucht, mich bei Sami am DLR beworben und bin angenommen worden. Das Thema hieß: „Billard spielen mit einem anthropomorphen Roboter“, und die Fragestellung lautete: Was können wir mit der Feinfühligkeit und den Fähigkeiten des Roboters machen? In diese Richtung habe ich meine Diplomarbeit geschrieben, und anschließend haben wir ein komplettes Steuerungs- und Regelungssystem sowie erste Prototypen einer neuartigen Programmierung für Roboter entwickelt, in der es um die einfache Bedienung und um die Nutzung dieser Feinfühligkeit, um die Interaktion mit dem Menschen und die Vernetzung ging.
Feinfühligkeit, Interaktion, Vernetzung – das sind ja alles menschliche Eigenschaften bei einer Maschine. Will man das wirklich erreichen?
Prof. Dr.-Ing. Sami Haddadin
Grundsätzlich sollte sich die Robotik, wie wir sie verstehen, am Menschen orientieren, und daher haben wir damals auch die Forschungsgruppe Human-Centered Robotics gegründet. Uns war es immer wichtig, den Menschen als Vorbild zu sehen und zu überlegen, woher er jene Fähigkeiten hat, die ihn einer Maschine so überlegen machen, gerade bei Eigenschaften wie der Feinfühligkeit. Menschen sind Robotern immer noch haushoch überlegen, weil sie nicht nur die Fähigkeit des abstrakten Denkens, also der Kognition, sondern auch die weitaus bessere Motorik haben. So stand für uns immer der Mensch als Vorbild und Nutzer im Mittelpunkt: einerseits für das Design und die Interaktion mit der Maschine, andererseits für das technische Imitieren dieser Fähigkeiten.
Heißt das also, dass Sie menschliche Fähigkeiten mathematisch und technisch abbilden?
Dipl.-Inf. (FH) Sven Parusel
Genau das versuchen wir.
dr. med. (Univ. Debrecen) Simon Haddadin
Eigentlich habe ich nicht viel hinzufügen. Sven ist ja ein anerkannter Experte auf dem Gebiet. Wenn man das wirklich so abstrahieren möchte, versuchen wir im Prinzip, das, was den Menschen wirklich so einzigartig macht – sein Bauplan, aber auch seine „Software“ –, zu verstehen und in technische Systeme umzusetzen. Der Mensch ist eben weitaus mehr als nur Hardware, weitaus mehr als nur Software, sondern eine Symbiose aus beidem. Und wenn es gelingt, diese Erkenntnis in ein technisches System umzusetzen, das aber eben nicht den Zweck hat, menschliche Fähigkeiten zu ersetzen, kann man das System viel besser benutzen. Es ist quasi dem Menschen ähnlicher und dadurch viel einfacher und verständlicher. Es ist der Weg, Technologie näher am Menschen zu entwickeln.
Welcher Schritt in diesem Entwicklungsprozess war für Sie der wichtigste und welcher der schwierigste?
Prof. Dr.-Ing. Sami Haddadin
Diese Frage lässt sich nicht eindeutig beantworten, denn wir sind auf viele offene Fragen gestoßen. Nehmen wir das Thema Sicherheit. Es gab vor zehn Jahren keine Roboter, die aus dem Schutzbereich herausdurften. Das war eine riesige Hürde. Im ersten Schritt galt es zu überlegen: Wie müssen die Systeme denn überhaupt aussehen? Wie werden Standards gesetzt, um so etwas zu ermöglichen, es voranzutreiben? Im zweiten Schritt ging es um folgende Fragen: Wie kann man das Konzept der Feinfühligkeit in eine Technologie umsetzen, die auch Verbreitung finden kann, die man auch in eine Skalierung bekommt und die nicht, wie ein Roboter fürs Weltall, mehrere Millionen Euro kostet? Wie können wir das Thema salonfähig machen? Wie können wir die Benutzbarkeit realisieren? Wir mussten eine völlig neue Programmiersprache entwickeln – allein das ist ja ein großes Innovationsthema. Der dritte Schritt war die Vernetzung und Lernfähigkeit, die ich hier der Einfachheit halber in einen Block packen möchte. Die Fragen hier waren noch völlig offen: Wie erschaffen wir autonome beziehungsweise teilautonome Assistenz, wie können wir die Systeme miteinander sinnvoll vernetzen, und wie sollen sie programmiert werden? Das ist auch deshalb so kompliziert, weil es nicht nur ein einfaches Smartphone ist, das der Kommunikation beziehungsweise dem Austausch von Daten dient, sondern weil das System mit der echten Welt und dem Menschen physisch interagiert. Das, was den Menschen so einzigartig macht, sein biomechanischer Bauplan und seine Motorik, all das musste in Mathematik und Algorithmik, die technisch umgesetzt werden können, abgebildet werden. Die Summe der Probleme war groß, die Fragestellungen waren zum großen Teil ungeklärt, ihre Beantwortung anzustreben also mit einem sehr hohen Risiko verbunden.
Dipl.-Inf. (FH) Sven Parusel
Ich glaube, ein entscheidender Schritt für uns – abgesehen von der eigentlichen Entwicklung – war, dass wir uns mit einer eigenen Firma ausgegründet haben. Damit schufen wir eine Umgebung, in der viele extrem kreative und intelligente Leute an den Themen und deren Umsetzung fokussiert mitarbeiten konnten. In einem Großkonzern wäre das in der Form sicher nicht möglich gewesen, dort hätte man nicht an einer Vision wie der unseren arbeiten können.
Eine Besonderheit Ihrer Innovation ist die leichte Programmierung. Ist „leicht“ damit auch „einfach“? Wie hat man sich das konkret vorzustellen?
Prof. Dr.-Ing. Sami Haddadin
Kinder können heute Roboter programmieren, und zwar keine Spielzeugroboter, sondern nun sogar einen echten Roboter wie der von Franka Emika. Und sie können damit Automatisierungsaufgaben lösen, für die vorher wochen- und monatelange Expertenarbeit benötigt wurden. Im Prinzip haben Sie einen Satz Roboter-Apps auf einem Tablet vor sich und ziehen sich sozusagen die Fähigkeiten zusammen. Der Roboter ist ein Werkzeug, Sie holen sich nur noch die dazu passenden Fähigkeiten, und in einem Frage-Antwort-Schema fragt der Roboter die Informationen, die ihm noch fehlen, ab. Diese kann man dem Roboter zum Beispiel einfach vormachen. Er lernt durch Nachmachen. Diese Apps sind auch ganz leicht zu verstehen, es geht beispielsweise um Greifen, Ablegen, Einfügen oder Schrauben. Im Prinzip sind das Tätigkeitsbeschreibungen, die in einem Browser miteinander kombiniert werden. Das funktioniert plattformunabhängig, es geht auf einem Tablet, auf dem iPhone, oder man programmiert es auf einem PC. Das heißt: All diese Technologien beherrschen die Digital Natives von heute aus dem Effeff, und dadurch ist die Sache kinderleicht geworden.
Steht Ihre neue Technik im Wettbewerb mit Industrierobotern, ist sie deren bessere Weiterentwicklung?
Prof. Dr.-Ing. Sami Haddadin
Nein, da muss ich sofort intervenieren, wir reden von einer anderen Generation. Im Vergleich zur 1980er-Jahre-Industrierobotik, die bis heute noch genutzt wird, sind wir auf einem völlig anderen evolutionären Level; wir haben eine komplette Neukonzeption beziehungsweise ein neues Denken über das, was der Roboter sein soll, erarbeitet. Bei uns ist der Mensch das alleinige Zentrum und die einzige Inspirationsquelle. Die klassischen Industrieroboter, die schlichte Positioniermaschinen sind, sind zwar in der Anordnung ihrer Achsen ein wenig ähnlich wie der Mensch konzipiert, aber das war es auch schon. Sie haben weder die Feinfühligkeit noch die Leichtigkeit, Lernfähigkeit oder gar die Vernetzung ihrer Fähigkeiten untereinander. Der Mensch erschließt sich die Welt auch nicht primär visuell, sondern insbesondere in frühester Kindheit über seinen Tastsinn. Dieser Tastsinn und seine unerreichte Nutzung machen den Menschen einmalig, er ist auch keine Weiterentwicklung der Bewegung, sondern öffnet uns eine völlig andere Welt. Und genau das gilt auch für Franka Emikas Roboter.
dr. med. (Univ. Debrecen) Simon Haddadin
Es gibt unzählige Menschen auf der Welt, die extrem anstrengende Aufgaben zu erledigen haben, jeden Tag, viele Stunden lang. Wir setzen unsere Mitbürger Gefahren aus – kurzfristig, weil es eine gefährliche Arbeit ist, und langfristig, weil so etwas körperlich über Jahrzehnte Beschwerden verursacht. Interessanterweise sind diese Tätigkeiten auch bis heute nicht automatisiert, es gibt schlichtweg keine Roboter dafür. Die Roboter, die man kennt, also Standard-Industrieroboter, können es nicht. Weitere Ursachen liegen eigentlich auch auf der Hand. Erstens: Roboterautomatisierungstechnik ist sehr teuer. Jeder Arbeitsschritt verursacht einen immensen Zeitaufwand, es dauert Monate, eine dieser Zellen aufzubauen. Zweitens: Wenn man die gleiche Zelle noch einmal aufbauen möchte, mit exakt der gleichen Tätigkeit, dann hat man im Grunde nichts eingespart, man fängt wieder von vorne an. Das ist also ein weiteres Investitionsproblem. Und drittens: Der Industrieroboter ist kein Werkzeug, sondern ein Substitut – im Gegensatz zu unserer Innovation: Wir haben ein Werkzeug für den Menschen geschaffen. Das ist der große Unterschied.
Prof. Dr.-Ing. Sami Haddadin
Was hat die Menschheit vermutlich am meisten vorangebracht? Unsere Werkzeuge, nichts anderes. Wir sind gerade an der Schwelle zu einer völlig neuen Ära der Menschheit, in der Menschen und komplexe autonome Maschinen gemeinsam den Alltag bestreiten werden. Und mit Technologien wie der von Franka Emika betreten wir diese neue Ära.
Ihre Innovation ist lernfähig und feinfühlig und soll auch älteren Menschen im Alltag helfen. Nun gibt es aber auch andere Robotersysteme, die wohl Ähnliches können. Was ist im Vergleich dazu das Besondere an Ihrer Innovation?
Prof. Dr.-Ing. Sami Haddadin
Lassen Sie mich die Frage ein wenig umständlich beantworten. Die Prothese, die wir derzeit bei mir am Institut entwickeln und die auf der Franka- Emika- Technologie basiert, kann einen ähnlichen Sprung wie der vom Industrieroboter zu der zur Franka- Emika-Technologie bedeuteten – also keine Evolution, sondern ein Technologiesprung, und der wird auch in der Prothetik stattfinden. Es geht in unserer Forschung im Prinzip darum, das zentrale Nervensystem des Menschen in einer Prothese abzubilden, damit diese nicht mehr wie bisher sequenziell, und damit sehr umständlich und ineffizient, gesteuert werden müssen muss, sondern für eine koordinierte Bewegung gesorgt wird, so, als wäre die Prothese der eigene Arm. Langfristig möchten wir erreichen, dass eine Prothese so einfach gestaltet und gesteuert werden kann, dass man keinen Unterschied mehr zwischen biologischen und technischen Systemen spürt.
Und dafür braucht man eben Systeme, in diesem Beispiel Prothesen, um die gewünschte Bewegung des Menschen in Echtzeit so schnell abzubilden, dass man keinen Unterschied mehr spürt – wir nennen das Transparenz. Diesen Transparenzgrad wollen wir so hoch wie möglich bringen, denn dann spürt man nur einen geringen Unterschied zwischen dem eigenen Körper und der Prothese. Das gelingt eben nur, wenn Sie den Bauplan und die Algorithmen des Menschen, also unser zentrales Nervensystem, die Motorkontrolle für die Motorik des Menschen, verstehen und die Prothese mit Feinfühligkeit und vom Menschen inspirierten Reflexen ausstatten. Stellen Sie sich vor, Ihre Prothese wäre in der Lage, wenn Sie aus Versehen Ihre Hand auf die Herdplatte halten, diese automatisch zurückzuziehen! Die Prothese schützt Sie, indem sie Sie in die Lage versetzt, einen Reflex zu zeigen, und damit hat sie natürlich ganz andere Fähigkeiten als alle Systeme bisher.
Für die Robotik, die unsere älteren Mitbürger unterstützen soll, haben wir einen neuen Begriff für die Technologie eingeführt: die Geriatronik. Es geht darum, dass wir Mechatronik, Künstliche Intelligenz und Maschinelles Lernen, also alles, was mit der modernen Robotik in Verbindung steht, in der Geriatrie und in der Gerontologie einsetzen wollen. Warum? Um die Selbstständigkeit des Menschen im Alltag durch Unterstützung von Geriatronik-Systemen so lange wie es geht zu erhalten. Wir wollen unsere Technologie für den Menschen einsetzen, wir wollen also sicherstellen, dass diese Technologie nicht nur um der Technologie willen erzeugt wird. Dafür sprechen wir mit älteren Menschen, mit pflegenden Angehörigen, mit Pflegepersonal, mit Gerontologie- und mit Geriatrieexperten darüber, was die Senioren wirklich benötigen. Unser System Leibniz, das wir derzeit aufbauen, wollen wir ab nächstem Jahr in Garmisch-Partenkirchen einsetzen – der Kosenamen lautet: Garmi. Es basiert auf der Franka-Emika-Technologie, bringt die beschriebene Feinfühligkeit mit, und durch Vernetzung ist es nicht nur ein Werkzeug für den Alltag unserer älteren Bürger, sondern auch ein völlig neues Kommunikationsmedium für Angehörige, aber auch medizinisches Personal.
Generell gilt: Es ist die nutzerorientierte, menschenorientierte Sicht, die das auszeichnet, was wir tun. Wir stellen uns nicht die technischen Fragen zuerst, sondern überlegen, was wir tun müssten, damit wir solche Dinge überhaupt erst ermöglichen. Und wenn man das tut, dann sehen die Systeme nicht nur von außen anders aus, sondern auch das Innere der Systeme, der Roboter, ist komplett anders. Die Feinfühligkeit steht an erster Stelle, die intuitive Nutzbarkeit an zweiter, ebenso die Vernetzung, die man zur intuitiven Benutzbarkeit schon fast automatisch benötigt, sowie die Lernfähigkeit dahingehend, dass sich der Roboter als intelligentes Werkzeug versteht. Das Werkzeug eines älteren Menschen, der es bei sich zu Hause einsetzen möchte, ist natürlich anders als das Werkzeug eines Fabrikarbeiters. Für Franka Emika haben wir künstliche Arme entwickelt, also Roboterarme. Das erlaubt nun auch den Sprung in die Servicerobotik. Wir können nun einen Roboter für den dritten, vierten Lebensabschnitt, in dem die Menschen zu Hause noch selbstbestimmt leben und arbeiten möchten, entwickeln und einsetzen.
Natürlich entsteht gleich die nächste Frage: Ist das Ganze auch bezahlbar? Unser Gesundheitssystem hat bekanntermaßen große Probleme, und wir wollen, dass unsere Assistenzsysteme zum Beispiel die Krankenschwestern entlasten, die Tätigkeiten durchführen, die mit der Pflege nichts zu tun haben, und dies soll auch bezahlbar sein.
Kann der ältere Mensch auf die Fähigkeiten seines Roboters vertrauen?
dr. med. (Univ. Debrecen) Simon Haddadin
Er muss es können, sonst wird das System nicht akzeptiert, und dann hat es auch keinen Sinn.
Wie teuer ist ein solches Gerät? Die Kosten im Gesundheitswesen sind ja gerade bei der älter werdenden Bevölkerung ein großes Thema.
dr. med. (Univ. Debrecen) Simon Haddadin
Grundsätzlich war es immer unser Ziel, das Ganze so günstig, wie möglich zu machen. Der Roboterarm, so wie er jetzt zur Verfügung stehen wird, kostet 9.900 Euro in der Basisausführung. Das ist in etwa ein Zehntel von dem, was ein vergleichbarer herkömmlicher Roboter kosten würde. Und auch die Servicerobotik oder ein Humanoid darf dann nicht in dem bisherigen Rahmen liegen, da sprechen wir ja von sechs- bis siebenstelligen Beträgen. Auch hier wollen wir eine neue Preisklasse schaffen. Wir sind gerade in ein größeres Pilotobjekt eingebunden und versuchen, die gesetzlichen Krankenkassen und Pflegeversicherungen mit ins Boot zu holen. Denn die sind ebenfalls betroffen: Ein gebrechlicher älterer Herr beispielsweise kommt zwar vielleicht zu Hause noch zurecht, hat aber Probleme, sich Essen zu machen oder die Post aus dem Briefkasten zu holen, und landet aus diesem Grund im Pflegeheim. Das System ist für Krankenkassen interessant, denn wenn man den Zeitraum der Selbstversorgung zu Hause durch Assistenzsysteme verlängern kann, rechnet sich diese Unterstützung.
Prof. Dr.-Ing. Sami Haddadin
Der Gemeinderat Garmisch-Partenkirchen hat hier Unterstützung zugesagt. Die Technologie, die wir entwickelt haben und derzeit entwickeln, soll in groß angelegten Studien und Einsätzen in Probewohnungen für ältere Menschen im realen Betrieb getestet werden – zum ersten Mal. Das ist ein ganz tolles Zeichen, dass so etwas in einer Gemeinde stattfindet, in der der dritte und vierte Lebensabschnitt ein großes Thema ist. Auch wir müssen Erfahrungen sammeln: Was gilt es noch zu verbessern? Was brauchen die Menschen wirklich? Hier ist eine ganz wunderbare Initiative entstanden.
Wollen Sie damit sagen: Erst kommt die Vision, dann die Technik?
Dipl.-Inf. (FH) Sven Parusel
Es wäre gar nicht möglich gewesen, das alles zu entwickeln, wenn wir diese Vision nicht gehabt hätten. Der Vision folgen dann die Algorithmen, die Hardware und Software.
Prof. Dr.-Ing. Sami Haddadin
Es ist nicht so, dass wir zunächst eine Technologie entwickelt und anschließend geschaut haben, was wir damit machen können. Wir wollen eine Vision verfolgen, wir wollen Assistenzsysteme für den Menschen schaffen, und daraus hat sich abgeleitet, was wir dafür tun, erforschen und entwickeln müssen.
Um auf die wirtschaftlichen Aspekte zu kommen: Wie viele Systeme gibt es schon auf dem Markt, und wie viele sind im Einsatz?
dr. med. (Univ. Debrecen) Simon Haddadin
Wir haben derzeit Systeme bei sehr engen Partner in der Forschung und Entwicklung und stocken nun unsere eigene Produktion mit weiteren Robotern auf, um hier ein weltweit einmaligen Automatisierungsgrad zu erreichen. Die kommenden vier bis fünf Wochen wird dann ausgeliefert, und Ende des Jahres sind wir bei rund 1.000 Robotern. Das ist unser Ziel, und das werden wir auch erreichen. Wir werden zunächst circa 600 Systeme an Forschungseinrichtungen, Konzernforschungen und Universitäten ausliefern, um unsere Community zu stärken. Danach wird der Roll-Out in die Industrie stattfinden, und unser Ziel ist es, eine Million Systeme bis 2025 auszuliefern.
Der Roboter kann sich ja, wie wir gehört haben, selbst produzieren. Entstehen dann aus Ihrer Innovation überhaupt Arbeitsplätze?
dr.med. Simon Haddadin
Zunächst einmal und ganz konkret haben wir in einem ehemaligen Werk eines Telekommunikationsunternehmens 40 Arbeitsplätze in der Produktion geschaffen, dazu fünf bis zehn in der Endmontage sowie weitere im Umfeld Logistiklager, Warenhaus und Lackiererei.
Die Frage war eher ketzerisch gemeint, weil es ein Video von Franka Emika gibt, in dem sich der Roboter selbst fertigt. Aber Spaß beiseite: Werden in Deutschland durch Ihre Innovation hochwertige Arbeitsplätze geschaffen?
Prof. Dr.-Ing. Sami Haddadin
Ja, jetzt mal ganz im Ernst: Allein bei Franka Emika arbeiten mittlerweile fast 70 bestausgebildete Entwickler neben all den anderen und stetig wachsenden Unternehmensbereichen. In Hannover sind wir außerdem als Universität gerade dabei, gemeinsam mit der IHK Hannover und den dort ansässigen Berufsschulen IHK-Zertifikate für die Ausbildung dieser neuartigen Roboter zu erzeugen. Ich leite in Hannover das Pilotprojekt „roboterfabrik“, wir gehen in die Berufsschulen und Gymnasien und arbeiten gemeinsam mit Franka Emika an der Robotikausbildung der Zukunft. Derzeit wird eine Begegnungsstätte aufgebaut, in der Schüler, Studenten und Fachkräfte an einem Ort „Robonatives“ werden können. Da treffen wir den Mechatroniker von morgen, den Robotiker von morgen, den Programmierer von morgen, aber eben auch die Nutzer von morgen. Und es werden so Arbeitsplätze beziehungsweise Fachkräfte geschaffen, die es heute noch gar nicht gibt. Wir haben Anfragen, was die Leute alles mit Robotern machen möchten, tolle Beispiele in den verschiedensten Applikationsbereichen, bis hin zum Tätowierer, der gerne Roboter einsetzen würde. Wir können heute noch gar nicht genau sagen, was morgen alles möglich ist. Es ist eine Reise, deren Verlauf schlichtweg nicht vorhersehbar ist.
Dipl.-Inf. (FH) Sven Parusel
Um nochmals auf die Analogie des Smartphones zurückzukommen: Franka Emika schafft eine Plattformtechnologie, speziell bezogen auf die Apps. Das heißt: Wir haben die Apps und wollen dann nächstes Jahr die Plattform so weit öffnen, dass auch andere Apps schreiben können. So wie im Smartphone-Bereich ein Riesenmarkt von App-Programmierern entstanden ist, glauben wir, dass wir viele App-Entwickler, eine sehr große Community an Bord bekommen, die dann quasi App-Programmierer für Roboter sind. Das ist ein neuer Markt, den es bisher nicht gab.
Prof. Dr.-Ing. Sami Haddadin
Wir schauen immer auf die Start-ups in den USA, aber warum gibt es keine Robotik-Start-ups bei uns? Das liegt daran, dass sich ein Start-up die Investitionskosten nicht leisten kann. Wie kann denn eine junge Firma eine halbe Million oder eine Million Euro in Automatisierungstechnik investieren? Denen gibt doch kein Mensch das Geld, dass sie erst mal in Metall investieren können. Den Leuten muss eine Plattform zur Verfügung gestellt werden, die die Investitionskosten drastisch senkt. Damit geben wir den Neugründern ein Mittel an die Hand, ihre eigenen Modelle zu erzeugen, ganz andere Lösungen zu schaffen und eigene Produkte auf den Markt zu bringen.
Gibt es in Ihrem Bereich zurzeit Wettbewerb?
Prof. Dr.-Ing. Sami Haddadin
Ich will vorsichtig mit solchen Aussagen sein, zumal wir in einem Land aufgewachsen sind, das eher Understatement pflegt. Im Bereich Robotik hat die Forschung in Deutschland stattgefunden, die Technologieentwicklung hat hier stattgefunden, der Techtransfer in die Start-ups hat in unserem Unternehmen stattgefunden, und die Kommerzialisierung hat in Deutschland stattgefunden. Ich persönlich sehe folglich derzeit niemanden, der unseren Stand erreicht hat. Wir sind hier sehr weit vorne.
dr. med. (Univ. Debrecen) Simon Haddadin
Was jetzt wichtig ist, deswegen sind mein Bruder und ich auch viel unterwegs bei politischen Veranstaltungen, Presseterminen etc.: Wir wollen so vielen Ebenen der Gesellschaft wie möglich vermitteln, dass es hier in Deutschland eine neuartige Plattformtechnologie gibt, die in der Lage ist – und wenn wir es gemeinsam richtig machen –, einen vergleichbaren Einfluss zu erreichen, wie es die Smartphone-Technologie aus dem Silicon Valley hatte. Am Ende sind unsere Konkurrenten die großen Technologieunternehmen der Welt, die investieren riesige Summen, und es ist eine Frage der Zeit, bis sie unser Level geschafft haben. Ob das Jahre dauern wird, sei mal dahingestellt. Aber für uns heißt das, dass wir in Deutschland, in Bayern, in München, in Europa dafür sorgen müssen, dass wir genügend Unterstützung erhalten und dass diese Technologie auch hier auf lange Sicht groß bleiben kann. Ich war kürzlich in Brüssel, dort ging es um das Thema Roboterhaftung. Wer haftet, wenn neue intelligente Systeme, die selber lernen, einen Schaden verursachen? Es müssen auf vielen Ebenen entsprechende Rahmenbedingungen geschaffen werden, damit wir unseren Vorsprung auch langfristig behalten und ausbauen können.
Prof. Dr.-Ing. Sami Haddadin
Vorsprung in Deutschland bedeutet: Vorsprung durch Köpfe. Und wir haben viele kluge Köpfe verloren. Ich selbst habe gerade Rufe des Massachusetts Institute of Technology (MIT) und der Stanford Universität abgelehnt, weil ich der Überzeugung bin, dass wir das hier in Deutschland auf die Beine stellen sollten. Ich kämpfe stark dafür, die jungen klugen Köpfe hier zu halten. Viele der Franka-Emika-Kollegen – das muss man ganz ehrlich sagen – wären in den USA gelandet, wenn sie nicht Aufgaben bei Franka Emika gehabt hätten. Und es ist eine „Zuzug-Station“ für diejenigen, die nicht in die Großkonzerne gehen, sondern neue Wege einschlagen wollen: Auch die verlieren wir normalerweise immer ins Ausland.
Das war für uns damals ein Grund für die Entscheidung, Entwicklungen nicht zu verkaufen: Wir wollen Themen hier aufziehen, wir sind hier ausgebildet, wir haben hier unsere Mentoren, und wir sind mit dem richtigen Maß an Patriotismus am Werk. Wir glauben, dass die Voraussetzungen in Deutschland ganz wunderbar sind, wenn wir durch unsere Ingenieurskunst – jetzt auch durch mehr Verständnis für die Digitalisierung – die Großindustrie und mehr und mehr und mehr die politischen Entscheidungsträger überzeugen, dass diese Art von Robotik etwas komplett Neues ist und sie uns völlig neue Möglichkeiten bietet. Sie ist mehr als nur eine weitere Evolutionsstufe, und wir müssen das nachhaltig in Deutschland verankern, die Leute hier im Land halten, die Ausbildung entsprechend aufstellen. Diese Chance haben wir jetzt. Wir tun alles in unserem Wirkungsbereich, was wir tun können, um das zu ermöglichen.
dr. med. (Univ. Debrecen) Simon Haddadin
Wir würden gerne helfen, das Gegenstück zum amerikanischen Silicon Valley zu entwickeln, hier in und um München. Wir wollen ein Ökosystem schaffen, in das sich Start-ups, Hobbyisten, Uni-Absolventen und Studenten einbringen können, ohne dass hohe Kosten anfallen. Wir wollen einen Standort schaffen, an dem ganz neue Geschäftsmodelle und neue Technologien entstehen, die auf dem basieren, was wir jetzt tun – Schlagwort Cyberphysical, also der Schritt aus dem Internet hinein in die reale Welt.
Start-up – wie haben Sie das am Anfang finanziert? Und haben Sie die klassischen Gründerfehler gemacht?
dr. med. (Univ. Debrecen) Simon Haddadin
Zum Thema Fehler: Fehler haben wir viele gemacht, und das ist ja auch ganz normal. Und zur Finanzierung: Man muss mit kleinen Mitteln zeigen, was man zu leisten in der Lage ist. Und man braucht Unterstützung von Menschen, die an einen glauben. Für uns war und ist das vor allem Prof. Hirzinger – sowohl in technischer Hinsicht als auch, was die Vision betrifft. Von den großen Robotikern Deutschlands und Europas können wir lernen, und wir versuchen, einen kleinen Beitrag zu leisten, um irgendwann aufschließen zu können. Außerdem haben wir Unterstützung von der Helmholtz Gesellschaft, der Dachorganisation der DLR, erhalten und auch Privatiers gewonnen. Es ist uns gelungen, Leute aus den unterschiedlichsten Bereichen von unserer Innovation zu überzeugen.
Wir haben auf vielen Ebenen Kontakte geknüpft, denn wir wurden vorher von vielen großen Firmen für Dienstleistung und Consulting ins Haus geholt, wenn es darum ging, Probleme zu lösen. Das waren große Hersteller und einer der größten Autobauer Deutschlands, die Probleme hatten, die sie nicht lösen konnten, was uns aber gelungen ist. Daneben gab es noch Förderprojekte auf Bundesebene und durch bayerische Staatsministerien. Die letzten Schritte sind eher die klassischen Investitionsrunden. Glücklicherweise sind wir mittlerweile in der relativ starken Position. Nun erzielen wir auch gute Umsätze, und mit diesen Rückflüssen kann man viel bewerkstelligen.
Prof. Dr.-Ing. Sami Haddadin
Hinzu kommt, dass wir alle sehr genügsam sind. Das zeigt das Gewicht der Vision: Wir sind schlichtweg der Meinung, dass wir die richtigen Entscheidungen getroffen haben. Unser Ziel war nie, etwas in die Welt zu setzen, das einen riesigen monetären Rückfluss bringt. Der schönste Lohn besteht darin, dass man auf der ganzen Welt Gespräche über unsere Innovation führen und zum Beispiel mit unserem Geriatronik-Ansatz echte Probleme lösen kann. Eine schönere Bestätigung kann es nicht geben.
dr. med. (Univ. Debrecen) Simon Haddadin
Auf eine Sache möchte ich jedoch bei aller Begeisterung noch hinweisen: Wenn ich auf die vergangenen Jahre zurückblicke, lief die Entwicklung ziemlich gut. Es war immer relativ klar, was wir da tun. Doch was ich der nächsten Generation von Start-ups, die hoffentlich in einer größeren Anzahl in Deutschland entstehen werden, wünsche, ist, dass das ganze Prozedere, das einen vom eigentlichen Ziel ablenkt, einfacher wird. Es müssen andere Mechanismen geschaffen werden. Mein Bruder, Sven und ich mussten uns wochenlang mit Papierkram und mit Verhandlungen beschäftigen. Man ist jung und relativ unbedarft und sitzt plötzlich mit extrem erfahrenen Leuten an einem Tisch. Hier müssen bessere Wege für Start-ups geschaffen werden, und ich hoffe, wir können dazu etwas beitragen, quasi als Vermächtnis unserer Arbeit.
Prof. Dr.-Ing. Sami Haddadin
Wir stellen fest, dass es wesentlich mehr Start-ups gibt, seitdem wir da sind. Es wird mehr und mehr in die Robotik investiert. Die Leute haben verstanden, dass so etwas funktionieren kann. Bevor wir auf der Bildfläche erschienen sind, hätte man geglaubt, das kann nur ein Großkonzern schaffen. Und ich bin heute immer mehr vom Gegenteil überzeugt: Ein Großkonzern hätte das in der Form nicht bewerkstelligen können. Was wir geschaffen haben, ist kein Entwicklungs- und kein Evolutionsthema, es war eine völlig neue Konzeption und Denkweise bezogen auf das, was ein Roboter können soll.
Um das Ganze nochmals zusammenzufassen: Was ist das Innovative an Ihrem Projekt, das jetzt mit der Nominierung zum Deutschen Zukunftspreis bereits gewürdigt worden ist?
Prof. Dr.-Ing. Sami Haddadin
Innovativ sind drei Aspekte: ein technischer, ein gesellschaftlicher und ein unternehmerischer. Wir haben die Robotik mannigfaltiger gemacht und sie in ein neues Zeitalter gehievt, quasi salonfähig in der realen Welt gemacht. Sie ist nicht mehr nur eine Spezialtechnologie, sondern für jedermann verfügbar und anwendbar. Unsere Innovation hat einen sehr starken gesellschaftlichen Aspekt – sie kann unsere gesamte Gesellschaft umkrempeln. Und – wir haben das alles auch unternehmerisch umgesetzt.
Jetzt wollen wir noch auf Ihren persönlichen Werdegang kommen. Wer hat Sie begleitet auf Ihrem Weg? Sind Sie aufgrund der Familientradition in die Medizin eingestiegen?
dr. med. (Univ. Debrecen) Simon Haddadin
Nein, es war eher ein Quereinstieg. Ich hatte nicht vor, Medizin zu studieren, aber meine Mutter hat mich dazu bewogen. Ohne sie oder meinen Vater wäre ich heute nicht da, wo ich jetzt bin. Meine Eltern sind die Ersten, die ich hier nennen möchte. Dann kommt mein Bruder, der ja Professor ist und mich beruflich und vor allem auch im Privatleben immer wieder inspiriert. Wir sind extrem familienverbundene Menschen. Das liegt vielleicht auch an unseren Wurzeln: Unsere Eltern sind beide Immigranten aus verschiedenen Ländern. Ich will jetzt nicht sagen, dass wir hier in einem fremden Land leben – wir sind in Deutschland aufgewachsen –, aber es gab eine familiäre Einheit. Das hat mich sehr geprägt. Mein Vater hat mich dazu gebracht zu lernen, bis die Augen auf dem Tisch liegen. Das begleitet mich bis heute: bei allem, was man tut, zu versuchen, das Beste daraus zu machen. Meine Eltern sowie mein Bruder und meine Schwester waren in meinem Leben die wichtigsten Personen, bis vor circa drei Jahren mein Sohn auf die Welt gekommen ist. Zudem gibt es auch im beruflichen Umfeld sehr wichtige Menschen, allen voran Prof. Gerd Hirzinger oder auch Prof. Alin Albu-Schäffer, die uns eine Plattform gegeben haben, eine „Bühne“, auf der man spielt, nicht irgendwo in einer Seitenstraße, sondern auf einer repräsentativen Bühne. Nennen möchte ich auch meinen Doktorvater aus der Pathologie, Prof. Molnárder, der mir eine akribische, exzellente Arbeitsweise mitgegeben hat.
Prof. Dr.-Ing. Sami Haddadin
Das kann ich nur bestätigen Wir sind aufgrund unserer Herkunft familiär sehr stark verbunden. Mitbekommen haben wir Kreativität und Freiheit. Neugier war immer etwas Positives bei uns in der Familie, bei uns wurde wissenschaftlich und politisch viel diskutiert. Uns hat immer viel mehr verbunden als getrennt, auch heute noch und auch zwischen den Generationen. Unser Vater kommt aus Jordanien, aus einer katholischen Familie, wo Bildung seit jeher eine große Rolle spielt. Das wurde uns auch mitgegeben. Mit unserer finnischen Mutter kamen dann Kreativität und Freiheitsdenken dazu. Geboren wurden wir in einem Land, in dem die Ausbildung und die akribische Arbeit wichtig sind. Was uns ebenfalls stark beeinflusst hat, war der Übergang von einem getrennten Deutschland zu einem vereinten Europa. Mir persönlich gab beides – die Familie und der gesellschaftliche Wandel – die Möglichkeit, meinem Forschertrieb nachzugehen. Ich wollte immer Forscher werden, das hat mich immer umgetrieben. Dann gab es viele Förderer, ich hatte immer auch historische Vorbilder. Ich schaue zu Menschen auf, von denen ich viel halte, möchte von ihnen lernen, weiß es sehr zu schätzen, dass sie sich Zeit für mich nehmen und das, was ich tue und was wir tun, verstehen. Durch die Tatsache, dass ich – zumindest glaube ich das – sehr offen bin und dass auch andere sehr offen mit mir umgehen, bin ich zu einem überzeugten Weltbürger geworden.
Dipl.-Inf. (FH) Sven Parusel
Bei mir ist es anders gelaufen. Ich komme nicht aus einer Akademikerfamilie, und deswegen war es nicht klar, dass die Wissenschaft plötzlich mein Weg sein könnte. Ich war eigentlich immer eher praktisch veranlagt, habe aber sehr früh auch von meinen Eltern die Neugier und den Wert von Wissen mitbekommen. Ich habe zuerst auch durch das Studium an der Fachhochschule eher den praktischen Weg gesucht und bin dann am DLR zur Wissenschaft gekommen. Sami und unser Institutsleiter Prof. Gerd Hirzinger haben mir dann diesen Weg gezeigt.
dr. med. (Univ. Debrecen) Simon Haddadin
Es sind nicht immer nur Lehrmeister, die einen prägen, sondern es ist das Team, das einem auch bei schwierigen Entscheidungen absolutes Vertrauen entgegenbringt. Wir sitzen uns seit fünf Jahren sozusagen auf dem Schoß, und noch immer herrscht diese unheimliche Dynamik vom ersten Tag. Alles wird besprochen, und wenn das kleinste Detail nicht mehr stimmt, wird sofort versucht, das in der Gruppe zu lösen. Die Menschen, die hier bei uns sind, haben mich sehr geprägt.
Wie groß ist das Team mittlerweile?
dr. med. (Univ. Debrecen) Simon Haddadin
Wir gehen gerade auf die 80 zu, ungefähr 65 davon sind Festangestellte, der Rest Freiberufler. Ein Großteil unserer Belegschaft wurde bei uns ausgebildet. Wir haben ungefähr 20 oder 25 Master-Arbeiten bei uns betreut. Etwa 40 Mitarbeiter sind in der Produktion beschäftigt.
Prof. Dr.-Ing. Sami Haddadin
Wir hatten nie Probleme, Nachwuchs zu finden. Als das Thema „Digitalisierung der Industrie“ aufkam, waren wir ein Team, das sich als „Bewegung“ verstanden hat – gruppiert um ein paar maßgebliche Leute natürlich, aber jeder identifiziert sich mit dem, was wir tun. Das ist ja das Besondere: Wir haben immer gedacht, dass das, was wir tun, das Richtige ist, und konnten mit vollem Herzen dabei sein. Sven Parusel war damals am DLR mein Diplomand, wir haben gemeinsam Dinge auf die Beine gestellt, und wir haben jeden, auch junge Studenten, ernst genommen, denn jeder kann auf irgendeine Weise etwas Wichtiges und Sinnvolles leisten.
Dipl.-Inf. (FH) Sven Parusel
Ich habe mich ebenfalls gut aufgehoben gefühlt, weil in diesem Umfeld jeder, der eine Idee hat, angehört und wertgeschätzt wird. Das ist etwas, was wir vom DLR mitnehmen und auf unsere Arbeit übertragen konnten.
Eigentlich erübrigt sich die Frage, dennoch: Warum sollte man sich für diesen Berufsweg entscheiden?
Prof. Dr.-Ing. Sami Haddadin
Ja, die Frage muss in der Tat anders gestellt werden: Warum sollte man nicht das tun, was einem am Herzen liegt? Wir leben in einem freien Land. Als ich an die Uni Hannover berufen wurde – was ich als große Ehre empfunden habe –, hieß es, ich wäre mit knapp über 30 Jahren der Jüngste, der wahrscheinlich jemals in der Robotik und Regelungstechnik in Deutschland berufen wurde. Danach befragt, ist es aus mir herausgeschossen: „Ja gut – Alter ist ja zuerst mal keine Qualifikation!“ Was gibt es Schöneres, als etwas zu realisieren, was einem wichtig ist, also das zu tun, was man möchte? Ich habe manchmal das Gefühl, dass wir zwar durchaus von äußeren Zwängen getrieben werden, aber eine Generation sind, die sehr frei ist. Für diese Freiheit haben unsere Eltern und unsere Großeltern weltweit gekämpft. Das ist auch Verantwortung gegenüber unserer Umgebung, meinen Kindern gegenüber, unseren Mitmenschen gegenüber – ich möchte, dass sich junge Menschen kreativ ausleben können, so wie ich das konnte.
Ich habe immer das Gefühl von Freiheit gehabt – nicht nur die private zu Hause, sondern auch „geistige Väter“, die mir Freiheit gegeben haben. Das habe ich als unglaubliches Privileg empfunden, und dieses Privileg muss man deshalb weitergeben – natürlich ohne sich dabei gegenseitig zu behindern, ganz im Gegenteil: Wir sind hier umgeben von vielen Privilegierten, die von einer gemeinsamen Sache angetrieben werden und sich zusammengetan haben, um ihr Ziel zu erreichen. Dann ist es auch nicht so schlimm, wenn man mal hinfällt.
Wie sehen Sie sich selbst: eher als Wissenschaftler oder eher als Unternehmer, oder wechseln Sie die Hüte?
Dipl.-Inf. (FH) Sven Parusel
Weg von der Wissenschaft hin zum Unternehmerischen, zur Produktentwicklungen, ist kein kleiner Schritt. Das ist uns nicht leichtgefallen, aber man gewinnt natürlich neue Möglichkeiten. Und deswegen ist das eben Angesprochene so wichtig: Das Team besteht aus „Getriebenen“, aus innovativen Leuten. Wir sind kein Teil der klassischen Industrie, denn wir haben weiterhin viele Forschungsaufträge, weshalb wir die Forschung nicht ganz hinter uns gelassen haben. Und wir können darüber hinaus im Rahmen des Produkts sehr viel Neues entdecken.
Prof. Dr.-Ing. Sami Haddadin
Bei der Frage „Wissenschaftler oder Unternehmer“ steht bei mir persönlich klar der Wissenschaftler im Vordergrund. Mich erfüllt es mit Stolz, dass das Unternehmerische auch ohne mich so gut funktioniert. Ich bin kein Unternehmer. Ich habe zwar damals ein Unternehmen gegründet, aber der Grund dafür war, dass ich an die Vision geglaubt und gesehen habe, was uns umtreibt, wo wir hinwollen und was fehlt. Das war kein echtes Unternehmerdenken, sondern wir haben schlicht das Rüstzeug gebraucht, um unsere Vision auf die Beine zu stellen. Franka Emika haben wir nach und nach zu dem entwickelt, was es heute ist. Wir sind von der Forschung direkt in die Realität gegangen und haben nicht wie andere zehn oder 15 Jahre Technologietransfer betrieben. Darin sind andere viel besser als ich. Das Unternehmerische ist bei meinem Bruder in den besten Händen, das Team vertraut ihm, und ich kann zu 100 Prozent Forscher sein. Aus der Ferne gibt es vielleicht mal einen Ratschlag – ich kann anrufen, und die können sich den Rat anhören oder auch nicht. Entscheidungen treffen die anderen. Man muss den Staffelstab guten Gewissens übergeben können.
dr. med. (Univ. Debrecen) Simon Haddadin
Dass ich Wissenschaftler bin, kann ich mittlerweile nicht mehr von mir behaupten, weil ich mit sehr vielen anderen Dingen beschäftigt bin. Ich bin froh, dass ich ab und zu mal die eine oder andere Idee beisteuern kann. Das ist genauso wie in der Entwicklung und bei der Software: Am Ende ist es nicht eine einzelne Person, die etwas tut. Ich habe eine größere formale Verantwortung. Wenn man offiziell als Geschäftsführer eingetragen ist, dann ist man auch der, der an vorderster Front steht. Aber es ist keine Einzelleistung, wir haben sehr viele gute Leute, die uns unterstützen, denn ich habe keinen betriebswirtschaftlichen Hintergrund, das meiste haben wir uns selbst beigebracht. Und die Lernkurve steigt hier täglich, nicht über Wochen oder Monate.
Technologisch hatten wir immer eine sehr klare Vision, wo es hingeht, aber jetzt sind wir ein Unternehmen. Vision und Aufgabe des Unternehmens ist mehr als die reine Entwicklungsarbeit. Das ist etwas ganz Neues. Ich glaube, wir können Neues schaffen, und das ist eine enorme Herausforderung. Noch ist es nicht so weit, aber ich glaube, wir können ein großes Technologieunternehmen werden, und das ist auch unser Ziel.
Man spricht gerne von der „schönen digitalen Welt“. Wie sieht diese Welt Ihrer Meinung nach in 20 Jahren aus?
Dipl.-Inf. (FH) Sven Parusel
Die cyber-physischen Systeme sind im Kommen, und die nächste Generation wird damit leben, dass vernetzte Robotik allgegenwärtig ist. Das wird Einfluss auf die Gesellschaft haben. Vernetzungen gibt es ja auch schon in unserer Generation, etwa durch Smartphones, aber im Umgang mit der physischen Welt wird man dieses Thema in den nächsten 20 Jahren sehr stark vorantreiben. In diesem Sinne muss man den Nachwuchs fördern – wir sprechen bereits von den „Robotic Natives“, wenn von der nächsten Generation die Rede ist.
Prof. Dr.-Ing. Sami Haddadin
Als Wissenschaftler würde ich sagen: Ich habe keine Ahnung. Der Wissenschaftler, der viel weiter als fünf Jahre halbwegs zuverlässig prognostizieren kann, muss erst noch geboren werden. Das halte ich für höchst spekulativ. Aber wenn Sie mich fragen, wen man zu diesem Thema interviewen sollte, dann würde ich sagen: unsere Kinder. Die werden das, was wir hinterlassen, nehmen und was völlig Neues daraus machen. Kompetenz ist, wie bereits erwähnt, keine Frage des Alters. In 20 Jahren sind es nicht mehr wir, die Sie fragen sollten. Uns können Sie fragen: Was ist in fünf Jahren, in zehn Jahren los? Aber ich denke, eines ist sicher: Die Robotik wird in Zukunft überall sein. Wir werden mit Maschinen kommunizieren, es wird so gut wie keine Grenze geben zwischen Mensch und Maschine, es wird ganz andere Möglichkeiten geben zu interagieren und zu leben. In 20 Jahren wird die Robotik, die Automatisierungstechnik, hoffentlich das geschafft haben, wofür sie angetreten ist: die Sklaverei auf der Welt abzuschaffen. Wir wollen dafür sorgen, dass nicht Zehnjährige unsere Kleidung herstellen müssen, sondern dass jedes Kind so aufwachsen kann, wie es bei uns möglich ist. Das große Thema „Zukunft der Arbeit“ ist und wird nicht nur bei uns in Deutschland von zentraler Bedeutung sein, es ist weltweit das große Thema. Das sollte die Robotik schaffen.
dr. med. (Univ. Debrecen) Simon Haddadin
Das sehe ich genauso. Endlich sollen die Menschen wieder in den Vordergrund rücken. Das passiert ja heute schon in der digitalen Welt: Im Internet ist alles kundenzentriert, es setzt sich das durch, was den Leuten am meisten hilft, also auch der Masse, und das meistens zu einem günstigeren Preis und meistens auch mit mehr Komfort. Das fängt schon beim Carsharing an: Ich brauche mir in der Stadt kein Auto mehr zu kaufen. Unsere gesamte Technologie sollte dazu dienen, dass es uns Menschen besser geht, und da sollte man nicht an den deutschen oder europäischen Grenzen haltmachen. Es gibt viele Menschen auf diesem Planeten, die hart dafür arbeiten, damit wir hier schöne Smartphones haben. Diese Menschen haben ein besseres Leben verdient.
Prof. Dr.-Ing. Sami Haddadin
Das sehen alle Mitglieder unseres Teams genauso. Wenn man die fragt, warum sie bei uns mitmachen wollen, sagen sie nicht, dass sie viel Geld verdienen oder coole Sachen machen wollen, sondern sie teilen unsere Meinung: Sie wollen, dass es durch unsere Technologie weltweit mehr Lebensqualität gibt.
Womit beschäftigen Sie sich denn, wenn Sie gerade nicht an Ihrer Technologie arbeiten? Was machen Sie, wenn Sie mal freie Zeit haben?
Dipl.-Inf. (FH) Sven Parusel
Ich bin leidenschaftlicher Motorradfahrer …
dr. med. (Univ. Debrecen) Simon Haddadin
… was ein Problem ist, weil wir Angst um ihn haben ...
Dipl.-Inf. (FH) Sven Parusel
… es ist ein großes Hobby. Und immer, wenn es irgendwie geht, verreise ich mit meiner Frau. Aber so viel Freizeit bleibt einem gar nicht.
Prof. Dr.-Ing. Sami Haddadin
Ich rede nicht von Freizeit und sage auch nicht, dass ich arbeite, sondern ich bilde mir ein, dass ich eigentlich nur das tue, was mir Spaß macht, ob das nun Freizeit ist oder Arbeit. Und das versuche ich auch auf meine Kinder zu projizieren, sie zu freien, weltoffenen Menschen zu erziehen, was in dem Alter noch schwierig ist, aber ich tue mein Bestes. Meine Frau macht natürlich einen viel besseren Job als ich, sie ist einfach gut darin. Ich selber mache viel Musik, war in einer Hardrock-Band und spiele noch immer E-Gitarre. Ich bin kein brillanter Musiker, aber ein engagierter Musiker. Ich habe auch sehr viel gemalt und Sport gemacht, aber dafür bleibt leider keine Zeit mehr. Und ich interessiere mich für viele andere Dinge, die mit Robotik nichts zu tun haben – leidenschaftlich!
dr. med. (Univ. Debrecen) Simon Haddadin
Ich habe früher – weil man viel zu wenig über Wissenschaftler weiß – viel darüber gelesen, besser gehört, Hörbücher beim Autofahren! Meine Leidenschaft ist der Sport – eigentlich, aber seitdem ich Vater bin, versuche ich, jede freie Minute mit meinem Sohn zu verbringen. Das ist für mich mit Abstand das Wichtigste.




Weitere Details
Lebensläufe
Prof. Dr.-Ing. Sami Haddadin
- 26.06.1980
- Geboren in Neustadt am Rübenberge, Niedersachsen, Deutschland
- 1999
- Abitur Gymnasium Stolzenau, Niedersachsen, Deutschland
- 1999
- Akademischer Sprach- und Zulassungskurs an der University of Reading, Vereinigtes Königreich, UK
- 1999 – 2001
- Diplomstudiengang Elektrotechnik an der Universität Hannover, Deutschland
- 2000
- Grundpraktikum Elektrotechnik bei Dauerstahl, Dohle & Co. KG, Garbsen,
- 2000 – 2001
- Werkstudent an der Universität Hannover/KBS, Hannover
- 2001
- Praktikum bei VMT (Vision Machine Technic), Weinheim,
- 2001 – 2006
- Diplomstudiengang Informatik mit Nebenfach Medizinische Informatik an der Fernuniversität Hagen
- 2001 – 2002
- Erasmus-Stipendiat Elektrotechnik an der Universität Oulu, Finnland
- 2002 – 2003
- Werkstudent an der Technischen Universität München, München
- 2002 – 2005
- Diplomstudiengang Elektrotechnik an der Technischen Universität München, (Abschluss: Dipl.-Ing. Elektrotechnik)
- 2003 – 2005
- Werkstudent bei Infineon Technologies AG, München
- 2005 – 2008
- Elite Graduate Program Technology Management am Center for Digital Technology and Management, Technische Universität München, Ludwig Maximilian Universität München & Elitenetzwerk Bayern, Deutschland (Abschluss: Honours Degree Technology Management)
- 2006 – 2009
- Masterstudiengang Informatics an der Technischen Universität München, München, (Abschluss: M.Sc. Informatics)
- 2006 – 2010
- Jungwissenschaftler am Robotik und Mechatronik Zentrum geleitet von Prof. Dr.-Ing. Gerd Hirzinger, Deutsches Zentrum für Luft- und Raumfahrt, Oberpfaffenhofen
- 2006 – 2011
- Dissertation an der RWTH Aachen, Deutschland, summa cum laude
Komitee: Univ.-Prof. Dr.-Ing. Jürgen Roßmann, Hon.-Prof. Dr.-Ing. Gerd Hirzinger
Titel: "Towards Safe Robots: Approaching Asimov’s 1st Law" - 2010 – 2013
- Lehrbeauftragter an der Technischen Universität München, München
- 2010 – 2011
- Koordinator „Human-Robot Interaction” am Robotik und Mechatronik Zentrum, Deutsches Zentrum für Luft- und Raumfahrt, Oberpfaffenhofen
- 2011
- Gastwissenschaftler an der Stanford University mit Prof. Oussama Khatib, Palo Alto, USA
- 2011
- Gastwissenschaftler bei Willow Garage, Menlo Park, USA
- 2011 – 2012
- Gruppenleiter „Human-Robot Interaction” am Robotik und Mechatronik Zentrum, Deutsches Zentrum für Luft- und Raumfahrt (DLR), Oberpfaffenhofen
- 2012 – 2013
- Wissenschaftlicher Berater bei Willow Garage, Menlo Park, USA
- 2012 – 2014
- Wissenschaftlicher Koordinator „Human-Centered Robotics” am Robotik und Mechatronik Zentrum, Deutsches Zentrum für Luft- und Raumfahrt (DLR), Oberpfaffenhofen, Deutschland
- 2013 – 2014
- Vorhabensleiter „Terrestrische Assistenzrobotik” am Robotik und Mechatronik Zentrum, Deutsches Zentrum für Luft- und Raumfahrt, Oberpfaffenhofen
- 2012 – 2014
- CEO & Gründer der Kastanienbaum GmbH, München
- 2014 – 2016
- CEO & Gründer der KBee AG, München,
- 2014 - 2017
- W3-Professur, Direktor Institut für Regelungstechnik, verbeamtet am Institut für Regelungstechnik (IRT), Leibniz Universität Hannover, Hannover
- since 2015
- Fachgutachter DFG, BMBF, European Research Council
- 2017
- Ruf an die Stanford University, Palo Alto, Kalifornien, USA, 2016, Associate Professor, abgelehnt
- 2017
- Ruf an das Massachusetts Institute of Technology, Cambridge, Massachusetts, USA, Ruferteilung, 2016, Associate Professor, abgelehnt
- seit 2018
- Ruf an die Technische Universität München (W3), Lehrstuhl für Robotik und Systemintelligenz, München,
- seit 2018
- Gründungsdirektor der Munich School of Robotics, Technischen Universität München, München,
Weitere Tätigkeiten
- seit 2006
- Internationaler Reviewer und Editor der wichtigsten Robotik-Buchpublikationen (Handbook of Robotics), Journale (IJRR, TRO, RAM, IFAC…) und Konferenzen (IEEE ICRA, IEEE/RSJ IROS, RSS)
- seit 2006
- Organisator und Komiteemitglied der wichtigsten internationalen Robotikkonferenzen IEEE ICRA, IEEE/RSJ IROS, RSS, HUMANOIDS, IFAC, Robio, …
- seit 2008
- Mitglied der IEEE
- seit 2011
- Internationaler Fachgutachter Volkswagen Foundation, Italian Ministry of Education, University and Research, Luxembourg
National Research Fund, Schweizer Nationalfonds, National Science Foundation, Agence Nationale de la Recherche - 2007 – 2011
- DIN Vertreter und Ausschussmitglied: ISO Working Group (WG) 7, Personal care robot
- seit 2014
- Mitglied von euRobotics aisbl
- seit 2016
- Mitglied des Vorstands, Center for Systems Neuroscience, Hannover
- seit 2017
- Mitglied des Vorstands, Robotics & AI Law Society e.V. (RAILS)
- seit 2017
- Mitglied der Wissenschaftlichen Gesellschaft für Montage, Handhabung und Industrierobotik (MHI)
- seit 2005
- Europäische Projekte NEUROBOTICS, PHRIENDS, SMEROBOT, VIACTORS, SAPHARI, EUROC, SoftPro, ILIAD
Programmkomittee: 2017 International Symposium of Robotics Resarch (ISRR), Puerto Varas, Chile - Forschungsschwerpunkte:
Mechatronischer Roboterentwurf
Mensch-Roboter Interaktion
Nichtlineare Roboterregelung
Aufgaben-, Bewegungs- und Reflexplannung
Roboterlernen und Optimalsteuerung
Menschliche Motorkontrolle
Neuronal gesteuerte Assistenzroboter
Intelligente Prothetik
Humanoide Roboter
Sicherheit in der Robotik - Publikationen:
Über 140 Publikationen in den renommiertesten, internationalen Robotik-Journalen, -Konferenzen und -Büchern
1 Buch
Ehrungen & Auszeichnungen
- 2007
- Gewinner: International Conference on Robotics and Automation (ICRA 2007): Best Video Award
- 2008
- Gewinner: Honours of the Elitenetwork Bavaria in Techology Management
- 2008
- Gewinner: Industrial Robot Journal: 2008 Literati Best Paper Award
- 2008
- Gewinner: International Conference on Intelligent Robots and Systems (IROS 2008): Best Application Paper Award
- 2009
- Gewinner: International Conference on Robotics and Automation (ICRA 2009): Best Service Robotics Paper Award
- 2009
- Finalist: Robotdalen Scientific Award 2009, “Honorable Mention”
- 2010
- Gewinner: 3rd place Walter Reis Innovation Award 2010
- 2010
- Finalist: IROS 2010: Finalist Best Application Paper Award
- 2011
- Gewinner: euRobotics Technology Transfer Award 2011 (DLR LBR-Team & KUKA LBR-Team)
- 2011
- Dr.-Ing. mit höchster Auszeichnung summa cum laude, RWTH Aachen, Deutschland
- 2011
- Gewinner: King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award (beste Journalpublikation in der Robotik 2011)
- 2012
- Gewinner: Euron George Giralt PhD Award (beste europäische Dissertation in Robotik)
- 2012
- Finalist: SfN BCI Award
- 2012
- Gewinner: IROS Best Jubilee Video Award
- 2012
- Gewinner: IROS Best Video Award
- 2013
- Gewinner: Martin Research Prize in Basic Research (vergeben durch Boston General Hospital & Harvard Medical School)
- 2013
- Gewinner: Borchers Plaque of RWTH Aachen
- 2013
- Gewinner: King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award (beste Journalpublikation in der Robotik 2013)
- 2013
- Nominee: Falling Walls Science Startup of the Year
- 2014
- Nominee: AAAI Best Robot Video Award
- 2015
- Teilnahme German American Frontiers of Engineering, GAFOE 2015 of National Academy of Engineering of the National Academies & Alexander von Humboldt Stiftung
- 2015
- Gewinner: “Deutschland - Land der Ideen”-Initiative
- 2015
- Gewinner: IEEE/RAS Early Career Award
- 2015
- Gewinner: RSS Early Career Spotlight Talk
- 2015
- Gewinner: Alfried Krupp Preis für Junge Hochschullehrer
- 2015
- Capital „Junge Elite” 2015 Outstanding Talents under 40, Category Society and Science
- 2016
- 3. Platz: euRobotics Technology Transfer Award 2016 (Kastanienbaum & DLR-Team)
- 2016
- Capital „Junge Elite” 2016 Outstanding Talents under 40
- 2017
- FRANKA EMIKA „2017 Top Tech to Watch “ in IEEE Tech Review
dr. med. (Univ. Debrecen) Simon Haddadin
- 05.03.1986
- Geboren in Bad Oeynhausen, NRW
- 1992 – 2000
- Grundschule und Gymnasium Stolzenau
- 2000 – 2005
- Geschwister-Scholl Gymnasium, Berenbostel
- 2005 – 2006
- Wehrdienst Lufttransportgeschwader 62
- 2006
- Studium Mathematik und Physik, Leibniz Universität Hannover
- 2006 – 2012
- Englischsprachiges Studium Humanmedizin, Universität Debrecen, Ungarn
- 2010
- United States Medical Licensing Exam
- 2012
- Dissertation zum Medical Doctor mit Exzellenz am Institut für Pathologie und Neuropathologie
- 2010 – 2013
- Wissenschaftlicher Mitarbeiter am Deutschen Zentrum für Luft- und Raumfahrt (DLR), Institut für Robotik und Mechatronik bei Herrn Prof. Dr.-Ing. Gerd Hirzinger
- 2012 – 2016
- Doktorand an der Technischen Universität München, Graduate School of Bioengineering bei Herrn PD Dr. med. Rainer Burgkart
- 2012
- Mitgründer der Kastanienbaum GmbH, München, DLR Spin-off
- 2013 – 2014
- Wissenschaftlicher Mitarbeiter und Assistenzarzt an der Medizinischen Hochschule Hannover, Klinik für Unfallchirurgie bei Herrn Prof. Dr. med. Christian Krettek
- 2015
- Studienarzt im Städtischen Klinikum München, Klinikum Schwabing, Klinik für Hämatologie, Onkologie und Immunologie bei Herrn Prof. Dr. med. Clemens-Martin Wendtner
- Seit 2016
- Mitgründer und Geschäftsführer FRANKA EMIKA GmbH, München
Weitere Tätigkeiten
- 2008 – 2012
- Stipendien für herausragende Studienleistungen der Universität Debrecen
- 2011 - 2015
- SAPHARI: Safe and Autonomous Physical Human Aware Interaction, European Integrated Project (FP7)
- 2013 – 2016
- Helmholtz Validierungsfonds Projekt „RACE-Lab“ –Entwicklung von zertifizierbaren Roboterfähigkeiten
- Seit 2016
- Antragssteller und Projektleiter des Projekts „//iSTRAP“ – intelligente und standardisierte Roboter Apps für FRANKA EMIKA beim Wirtschaftsministerium Bayern
- Seit 2017
- Projekt ROBINA – Roboterunterstützte Dienste für eine individuelle und ressourcenorientierte Intensiv- und Palliativpflege bei Menschen mit ALS
- Vorr. 2017
- Projektleitung des BMBF-Projekts “KoBo34“ - Intuitive Interaktion mit kooperativen Assistenzrobotern für das 3. und 4. Lebensalter
Ehrungen
- 2014
- Nominierung beim Falling Walls Science Start-Up of the Year
- 2015
- Dritter Gewinner des euRobotics Tech Transfer Award
- 2017
- FRANKA EMIKA „2017 Top Tech to Watch” in IEEE Tech Review
Publikationen und Patente
- 15 nationale und internationale Publikationen in Zeitschriften und als Vorträge
10 nationale und internationale Schutzrechte
Dipl.-Inf. (FH) Sven Parusel
- 14.01.1985
- Geboren in Kempten (Allgäu)
- 1991 - 1994
- Volksschule Kempten (Allgäu) am Haubenschloß
- 1994 - 1997
- Volksschule Sonthofen
- 1997 - 2001
- Staatliche Realschule Sonthofen
- 2001 - 2004
- Staatliche Fachoberschule Sonthofen
- 2001 - 2002
- Praktikum bei der Robert Bosch GmbH, Immenstadt
- 2002
- Praktikum bei Elektro Köberle e. K., Burgberg
- 2004 - 2009
- Studium Fachbereich Informatik an der Fachhochschule Kempten, Fachrichtung Praktische Informatik, Dipl.-Inf. (FH)
- 2005 – 2007
- Praktikum bei ATRIVIO GmbH, Kempten
- 2005 - 2016
- Selbstständige Tätigkeit Softwareentwicklung / Webentwicklung
- 2009 - 2014
- Wissenschaftlicher Mitarbeiter im Deutschen Zentrum für Luft- und Raumfahrt, Institut für Robotik und Mechatronik, Oberpfaffenhofen bei Dr.-Ing. Sami Haddadin
- 2012
- Gründung der Kastanienbaum GmbH, München
- seit 2012
- Chief Technology Officer bei Kastanienbaum GmbH, München
- 2014
- Gründung der KBee AG, München
- 2014 - 2016
- Chief Engineer bei KBee AG, München
- 2016
- Gründung der FRANKA EMIKA GmbH, München
- seit 2016
- Chief Engineer bei FRANKA EMIKA GmbH, München
Weitere Tätigkeiten
- 2011 - 2015
- SAPHARI:Safe and Autonomous Physical Human Aware Interaction, European Integrated Project (FP7)
- 2015 - 2016
- Projektleitung RACE-Lab: Robot Application Creator, gefördert durch Helmholtz-Validierungsfonds
Ehrungen
- 2010
- Finalist: IROS 2010 Best Application Paper Award
- 2011
- King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award
- 2013
- Nominierung: 2014 Falling Walls Science Startup of the Year
- 2014
- Nominierung: 2014 AAAI Best Robot Video Award
Kontakt
Team-Sprecher
Prof. Dr.-Ing. Sami Haddadin
Institut für Reglungstechnik
Leibniz Universität Hannover
Appelstraße.11
30167 Hannover
Tel.: + 49 (0) 511 / 76 24 523
E-Mail: Sami.haddadin@irt.uni-hannover.de
www.irt.uni-hannover.de
Pressekontakt
dr. med. (Univ. Debrecen) Simon Haddadin
Geschäftsführer
FRANKA EMIKA GmbH
Infanteriestraße 19, Geb.3
80797 München
Tel.: + 49 (0) 89 / 20 06 06 026
Fax: + 49 (0) 89 / 20 06 06 921
E-Mail: simon.haddadin@franka.de
www.franka.de
www.facebook.com/frankaemika/
www.twitter.com/FRANKAEMIKA
Mechtild Freiin v. Münchhausen, M.A.
Leiterin Referat für Kommunikation und Marketing
Pressesprecherin
Leibniz Universität Hannover
Welfengarten 1
30167 Hannover
Tel.: + 49 (0) 511 / 76 25 355
Fax: + 49 (0) 511 / 76 25 391
Mobil: + 49 (0) 177 / 37 34 026
E-Mail: vonMuenchhausen@zuv.uni-hannover.de
www.uni-hannover.de
Beschreibung der Institute und Unternehmen zu ihren nominierten Projekten
Robotik wird unsere Welt nachhaltig verändern und ist dadurch zwangsläufig eines der zentralen gesellschaftlichen Zukunftsthemen. Nichtsdestotrotz ist sie bis heute nur für einige wenige verfügbar. Enorme Kosten, schwierige Programmierung und Nutzung, sowie grundlegende technologische Beschränkungen, welche u.a. die absolute Trennung zwischen Mensch und Roboter durch Schutzzäune bedingen, sind schier unüberwindliche Hürden. Wie kann diese komplexe Technologie nun der Allgemeinbevölkerung oder gar Manufakturen in Schwellen- und Dritte Welt-Länder zugänglich gemacht werden?
Im Grunde stagnierte der Stand der Technik in der Robotik seit nunmehr 30 Jahren. Sie bietet vom Menschen abgeschottete, extrem teure unflexible Lösungen zum exakten Positionieren (Beispiel: Schweißpunkte setzen) und dem Folgen von Bahnen (Beispiel: Lackieren) hinter Schutzzäunen. Jedoch sollten Roboter ursprünglich -- die Grundideen gehen auf große Denker wie beispielsweise Leonardo Da Vinci oder Gottfried Wilhelm Leibniz zurück --, wie der aus dem westslawischen entlehnte Begriff robota (Fronarbeit bzw. ursprünglich Arbeit) ja bereits verdeutlicht den Menschen unterstützen und ihn von belastenden Aufgaben, also im Grunde der Sklavenarbeit, befreien. Hierfür müssen Roboter zugänglich, flexibel und skalierbar sein. Technisch gesprochen bedeutet dies, dass sie einfach bedienbar sind und für verschiedenste Anwendungen Einsatz finden. Darüber hinaus müssen bekannte Lösungen auf ähnliche Problemstellungen anpassbar und anwendbar sein. Und genau zu diesem ursprünglichen Ziel wollen die Nominierten die Robotik in den nächsten Jahren zurück bringen.
Geleitet und inspiriert von dieser Vision forschten Prof. Dr.-Ing. Sami Haddadin, Dr. med. (Univ. Debrecen) Simon Haddadin und Dipl.-Inf. Sven Parusel jahrelang gemeinsam am renommierten Institut für Robotik und Mechatronik des DLR mit anschließendem Technologietransfer und Weiterentwicklung in ein gemeinsam gegründetes Start-Up. Stets war das Ziel: Das erste System einer völlig neuen Generation von kostengünstigen, sicheren, intelligenten, aktiv unterstützenden Werkzeugen für Menschen zu entwickeln. Zunächst als Kollege in der Fabrik, später für Serviceanwendungen, um Ältere oder Kranke zu unterstützen und schlussendlich als Helfer im Alltag.
Auf der Hannover Messe 2017 wurde dann FRANKA EMIKAs „Powertool“ Panda vorgestellt. Das System wurde aufbauend auf der vollständig in Deutschland entstandenen, weltweit einzigartigen Robotertechnologie entwickelt und wird nun in Serie im Allgäu produziert. Das System lässt sich wie ein Smartphone über Apps bedienen und binnen Minuten auf neue Aufgaben einlernen - und dies ohne jedwede Robotikkenntnisse. Dabei ist das System derart feinfühlig, dass es direkt neben dem Menschen komplexe Arbeiten übernehmen kann, die ihm vom Lehrer Mensch gezeigt werden.
Die ultraleichte, modulare FRANKA EMIKA Technologie kann nun für die Robotik eine Bedeutung erlangen, wie die Einführung der PCs und Apps zu ihrer Zeit. Das System besitzt in jedem Gelenk ein dem muskulären Apparat nachempfundenes Sensorkonzept zur Interaktion mit der realen Welt. Diese hochempfindliche Feinfühligkeit erlaubt eine Nachgiebigkeit und Reaktivität durch ein künstliches zentrales Nervensystem sowie eine Lernfähigkeit sensormotorischer Fähigkeiten mittels neuartiger Algorithmen des Maschinellen Lernens. Sogar kollektives Lernen durch die Vernetzung von Systemen wird nun erstmals möglich, also das voneinander Lernen. Um die komplexen Eigenschaften Feinfühligkeit, Vernetzung, Interaktion und Lernen wirklich zu beherrschen, haben die Nominierten unter anderem ein neuartiges Programmier- und Interaktionsparadigma entwickelt. Der Mensch wird zum Lehrer des Roboterhelfers um ihn zu einem nützlichen und effektiven Werkzeug nach seinen Wünschen einzusetzen. In gestarteten Projekten werden die Roboterassistenten nun sogar in Behindertenwerkstätten und zur Pflege von ALS Patienten eingesetzt.
Die Notwendigkeit für unsere Gesellschaft Assistenzsysteme flächendeckend einzusetzen um die Herausforderungen der Zukunft – wie den demografischen Wandel, den weltweiten Wettbewerb oder zunehmende Produkt- und Serviceindividualisierung – zu meistern liegen auf der Hand. Allein die stetig zunehmende Anzahl alternder Mitmenschen mit Würde und Sorgfalt zu unterstützen und erstrebenswerterweise eine Zukunft in den eigenen vier Wänden zu ermöglichen, ist aufgrund der drastischen Personalnot heutzutage nicht möglich. Daher entwickeln die Nominierten derzeit den Hausroboter GARMI, der im 3. und 4. Lebensabschnitt den Erhalt der Selbstständigkeit sowie die Entlastung von Pflegekräften gewährleisten soll. Im Rahmen eines langfristig angelegten Projekts in Kooperation mit der Marktgemeinde Garmisch-Patenkirchen wird bis hin zur Errichtung von betreuten Wohnungen diese Entwicklung eine weltweite Strahlkraft erlangen.
Ähnliches möchten die Nominierten auch Trägern von Armprothesen ermöglichen denn bis heute werden durchweg einfache mechanische Greifwerkzeuge hergestellt. Die kostengünstige Armprothese myLimb, die sich derzeit in einer vielversprechenden Testphase befindet ist mit nie dagewesener menschenähnlicher Feinfühligkeit und entsprechenden Schutzreflexen ausgestattet. Damit schützt sie den Prothesenträger beispielsweise vor einer heißen Herdplatte. Durch das eingebaute teil-autonome Assistenzverhalten ist das System einfach zu benutzen, dass bisherige Nutzer die Prothese nach kürzester Zeit für zweihändige Vorgänge einsetzen können und nicht erst monatelang mit ihnen trainieren müssen.
Zusammenfassend ist es den Nominierten ein besonderes Anliegen alle Mitglieder unserer Gesellschaft an der Technologie teilhaben zu lassen. Hier liegt auch ein großer Fokus auf Kindern und Jugendlichen, den robonatives, die vergleichbar mit den Digital Natives eine neue gesellschaftliche Epoche, begründen. So kann die Generation der robonatives dafür Sorge tragen, dass die Symbiose aus deutscher Ingenieurskunst und modernster Informatik mit der Robotik eine Schlüsseltechnologie unserer Gesellschaft vorantreibt. Hierzu sind der einfache und kostenfreie Zugang zum Ökosystem über die FRANKA World, sowie die frühestmögliche Ausbildung der jungen Leute in der FRANKA Academy notwendig. Das Ergebnis werden nie dagewesene Möglichkeiten der Wertschöpfung sein, denn Roboter-Apps können von Start-Ups, Studenten oder Hobbyisten fast ohne eigene Investition entwickelt werden und eröffnen neue kommerzielle und nicht kommerzielle Anwendungsbereiche. Vor allem auch kleine und mittelständische Unternehmen können durch den Zugriff auf derartige Systeme stark profitieren und ihre nationale und internationale Konkurrenzfähigkeit beibehalten.
Die Nominierten arbeiten bereits seit weit über einer Dekade an der Umsetzung ihrer Visionen, wobei Sami Haddadin seit einigen Jahren das Institut für Regelungstechnik an der Leibniz Universität Hannover leitet und nun nach dem Erhalt von Rufen an die Stanford Universität sowie das MIT nach deren Ablehnung einen Ruf auf die Professur für Robotik und Systemintelligenz der Technischen Universität München angenommen hat. Außerdem wurde er zum Gründungsdirektor der „Munich School of Robotics, Machine Learning & Artificial Life“ bestellt. Simon Haddadin leitet als Geschäftsführer die FRANKA EMIKA GmbH mit ihrem Sitz in München, bei der Sven Parusel als „Chief Engineer“ die Abteilung für Software und Regelung leitet.
Die FRANKA EMIKA GmbH hat derzeit über 75 Mitarbeiter in der Forschung- und Entwicklungszentrale in München und wird monatlich durch international renommierte Kollegen erweitert, bindet also nicht nur hervorragenden Nachwuchs sondern zieht auch Experten aus der ganzen Welt an. Ab August 2017 wird das System in die Research Community ausgeliefert und soll als Referenzplattform für die weltweite Wissenschaft dienen. Der Produktionsstandort in Durach beheimatet derzeit ca. 40 Mitarbeiter und ist bereits jetzt dafür ausgelegt 300 Systeme in der Woche zu produzieren. Internationale Entwicklungs-, Support-, Vertriebs-, und Produktionsstandorte befinden sich in fortgeschrittener Planung und werden Anfang kommenden Jahres zunächst für den kommerziellen Einsatz in der Elektronikproduktion von Konsumgütern (PCs, Smartphones etc.) und professionellen Endgeräten (medizintechnische Geräte) eröffnet. Langfristig ist davon auszugehen, dass über 25 Mio. derartiger Assistenzsysteme sich im Einsatz befinden werden, wobei die Nominierten mit einem langfristigen Marktanteil von 10 – 20% rechnen.
Das Vorschlagsrecht zum Deutschen Zukunftspreis obliegt den führenden deutschen Einrichtungen aus Wissenschaft und Wirtschaft sowie Stiftungen.
Das Projekt „Mittelpunkt Mensch – Roboterassistenten für eine leichtere Zukunft“ wurde von „acatech – Deutsche Akademie der Technikwissenschaften e.V.“ und dem „Deutschen Patent- und Markenamt“ sowie der „Hochschulrektorenkonferenz (HRK)“ eingereicht.
Bundespräsident Frank-Walter Steinmeier verleiht am 29. November 2017 den 21. Deutschen Zukunftspreis 2017 an eines der drei nominierten Teams.
Präsentation des Projektes Abendveranstaltung, 13. September 2017
