Gebärdensprache
Leichte Sprache
Deutsch
DE
DZPWorld
The Prize
close
Der Preis
Message
Patrons
Board of trustees
Jury
Statutes
Tender
Winners & Nominees
Exhibition
Downloads
close
Search
search input
DZPWorld
The Prize
Message
Patrons
Board of trustees
Jury
Statutes
Tender
Winners & Nominees
Exhibition
Ausstellung
Konzept
Präsentation der preisgekrönten Projekte
Historie der Ausstellung
Besuch im Deutschen Museum
Downloads
Gebärdensprache
Leichte Sprache
Search
Photo material
Team 2
Robotic Visualization System - Efficient and effective surgical procedures
People
Stills
People
Stills
Prof. Dr. med. Andreas Raabe
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
Dr.-Ing. Michelangelo Masini
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 782kb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 5mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
Frank Seitzinger, MBA
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
Das Team
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
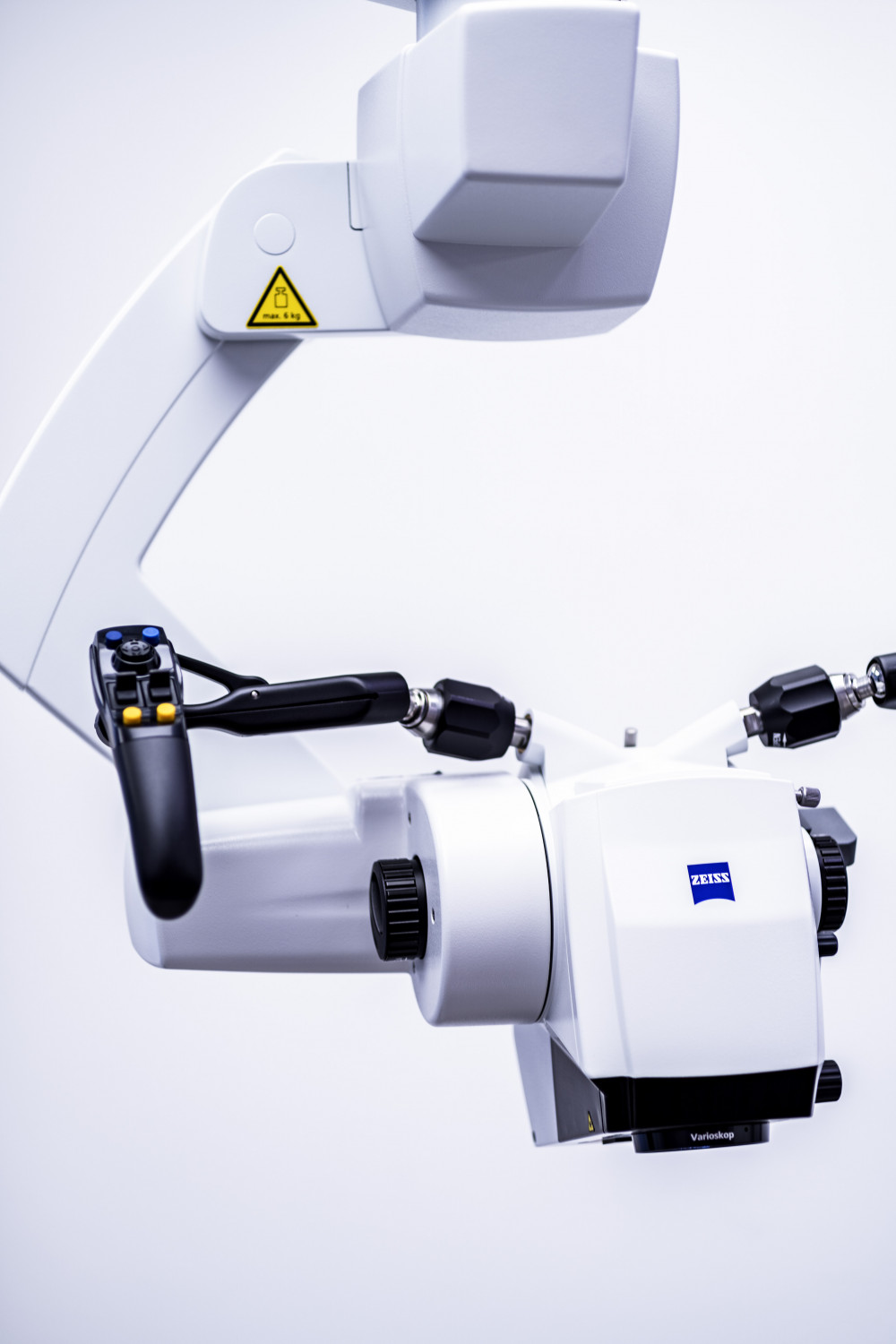
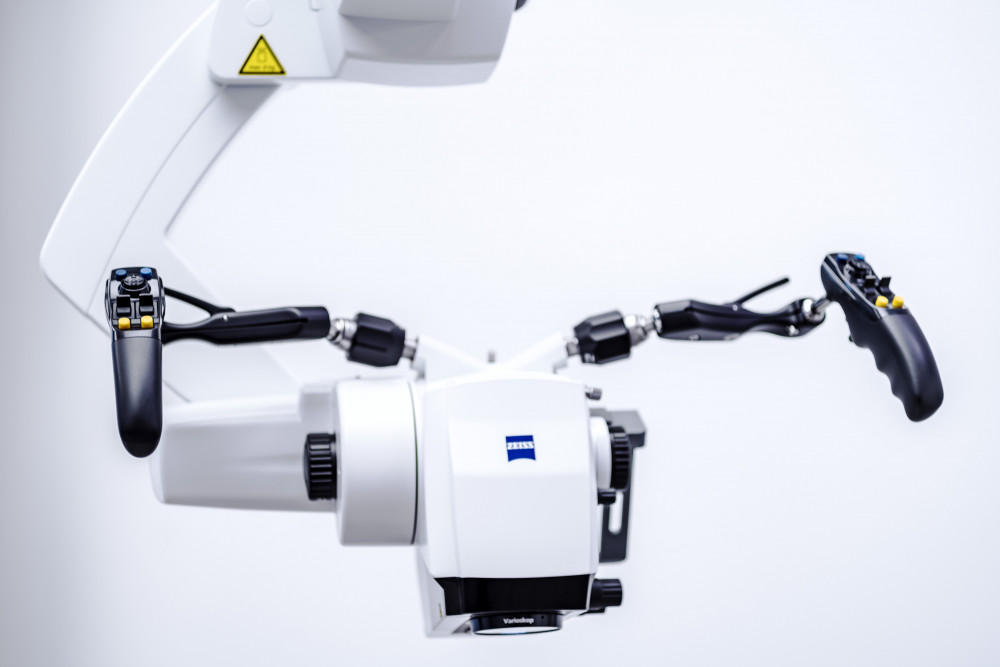
Atmosphärische Detailbilder zum Projekt
close
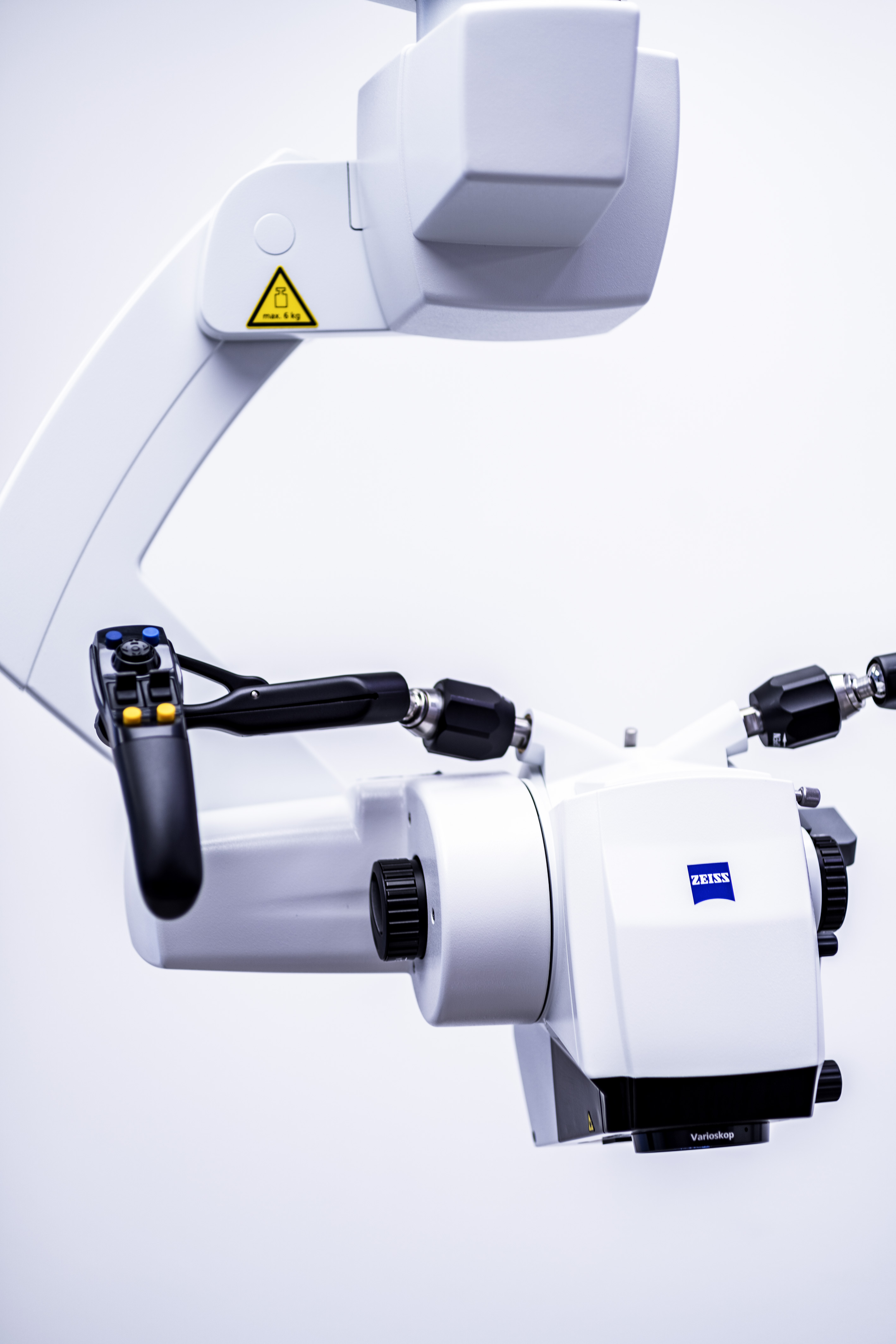
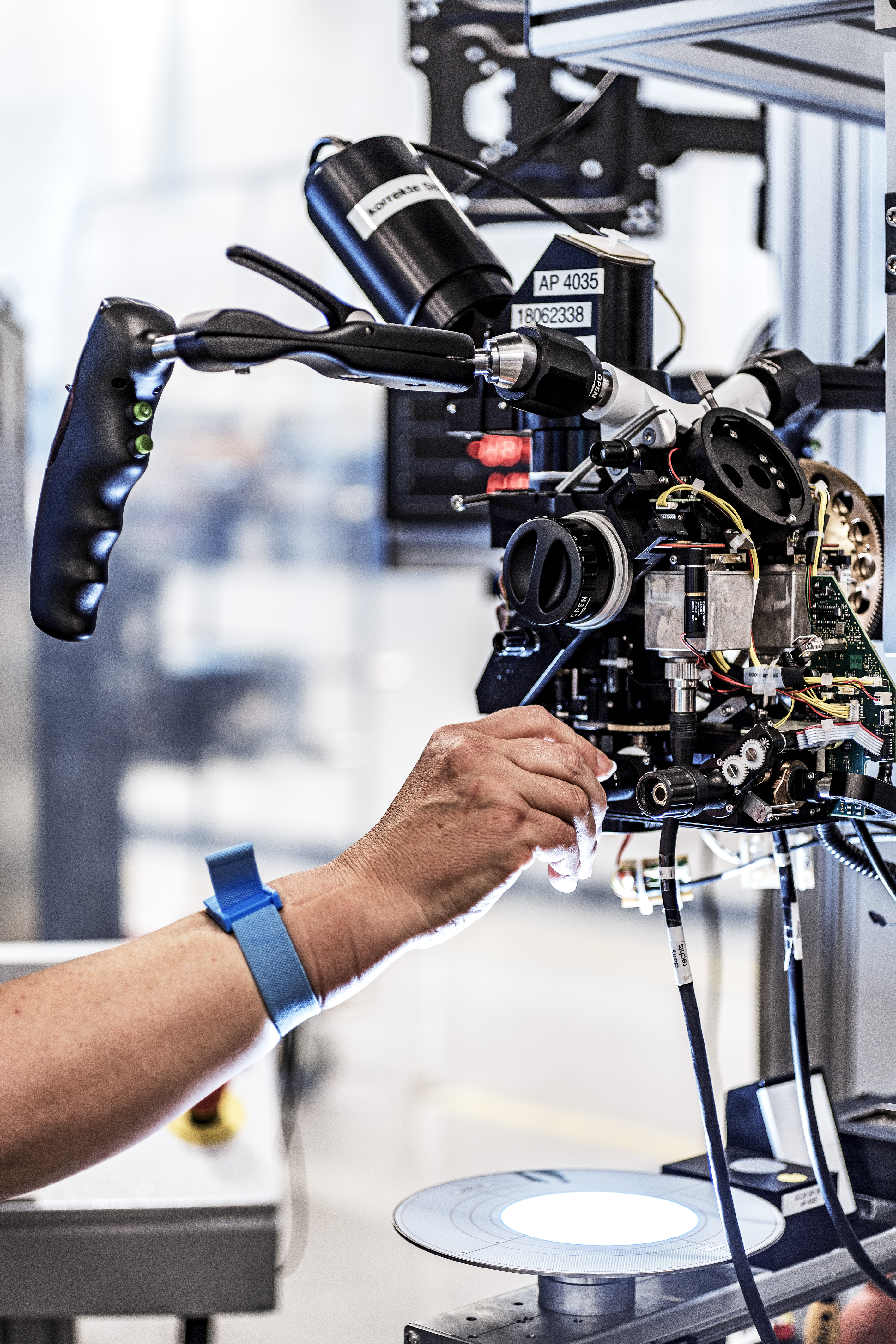
ZEISS QEVO Halter – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 in digitalem Set-up – Systemmonitore im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISSS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Chirurg in klassischem Set-up (frontal Zoom) - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
KINEVO 900 Chirurg in klassischem Set-up (frontal) - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Prof. Raabe Hände unter ZEISS KINEVO 900
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
Prof. Raabe Hände unter ZEISS KINEVO 900
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
QEVO Chirurg – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS QEVO Chirurg – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 – klassischer Set-up, Chirurg im Hintergrund am Systemmonitor
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 – klassischer Set-up
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up inklusive robotischer Aufhängung (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
KINEVO 900 Kopf in digitalem Set-up (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 612kb
Download link 300dpi
300dpi
close
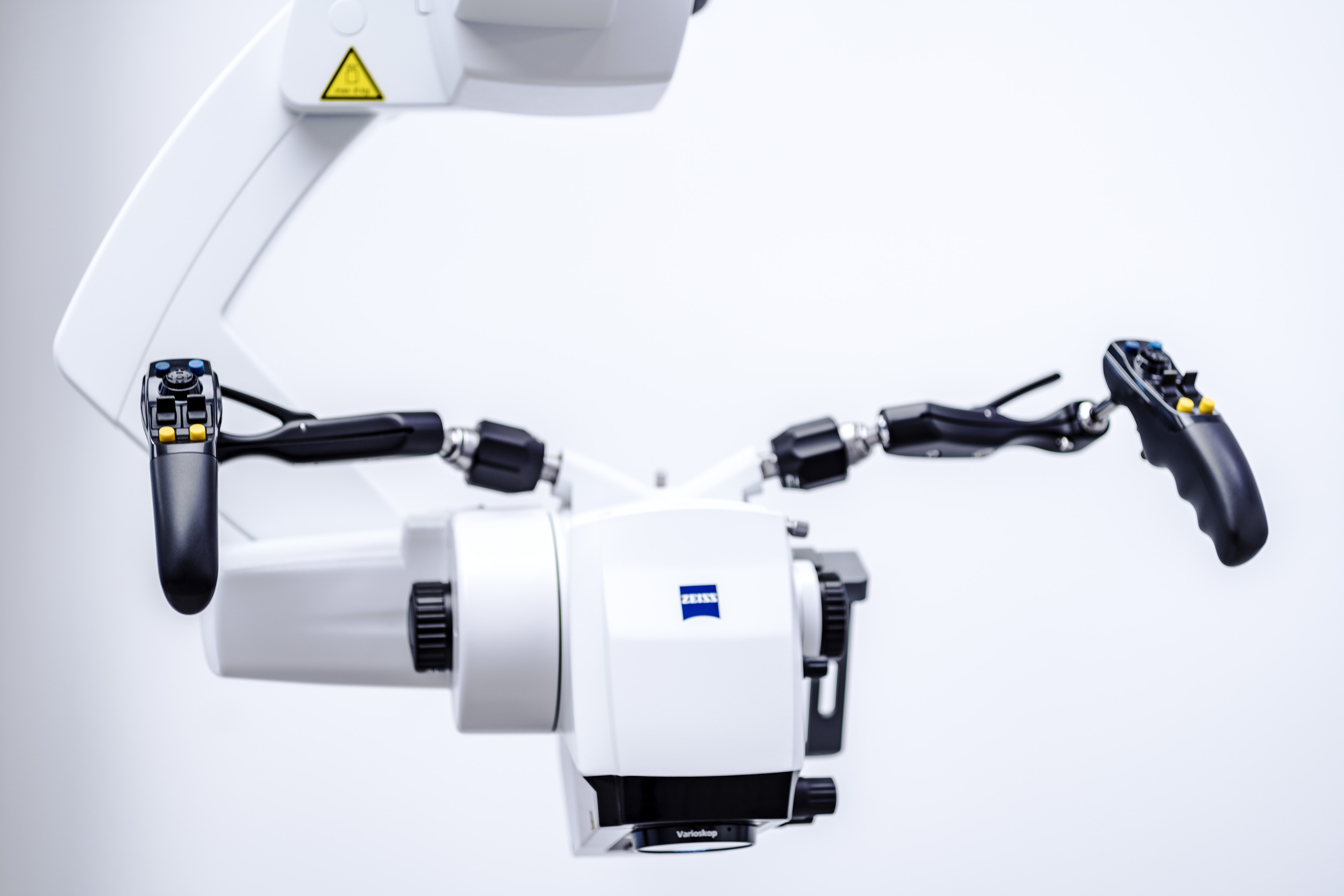
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal)
Download link 300dpi
300dpi
JPEG · 772kb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal)
Download link 300dpi
300dpi
JPEG · 626kb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Handgriff als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf in digitalem Set-up mit Anschlüssen (seitlich) – R&D im Hintergrund
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
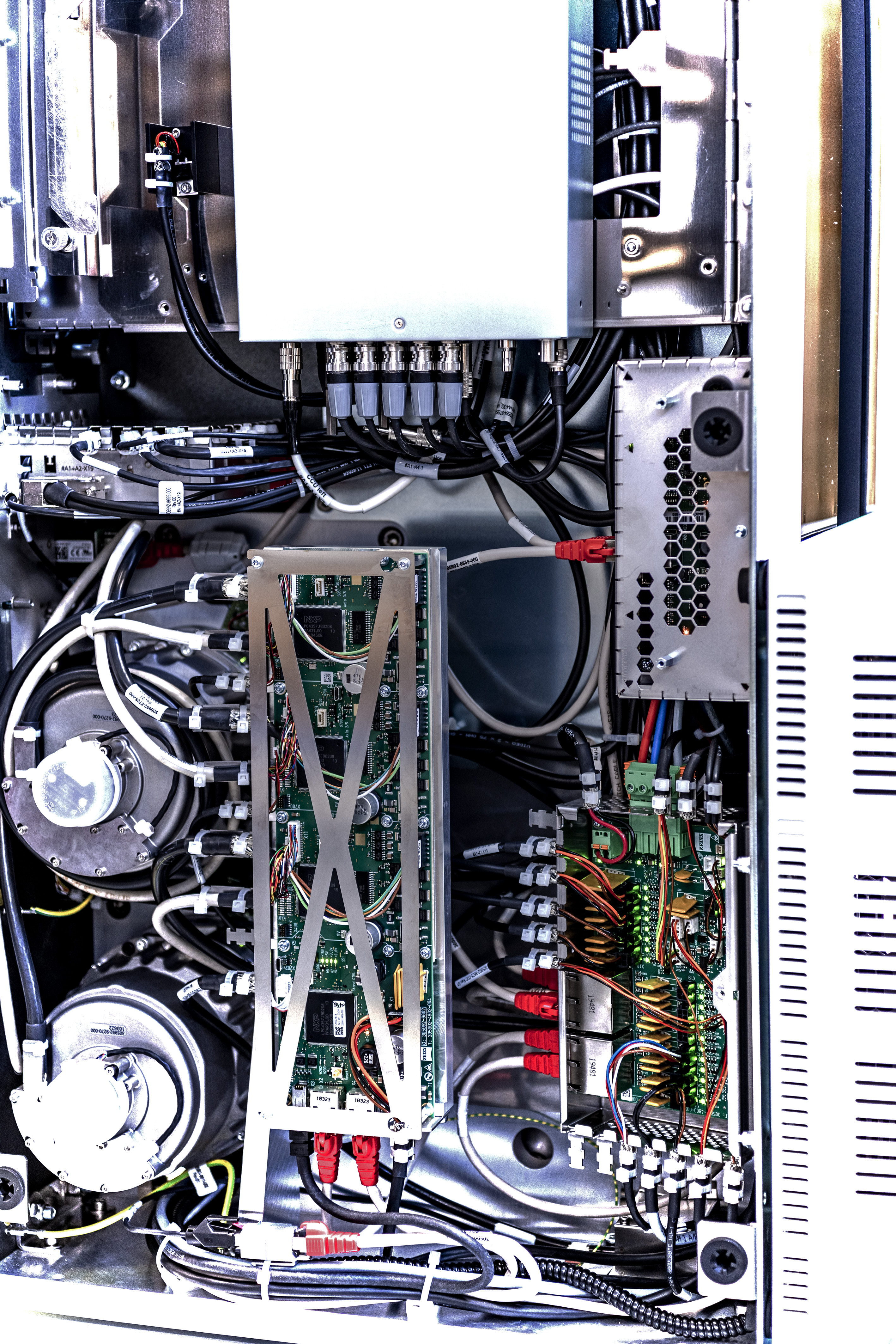
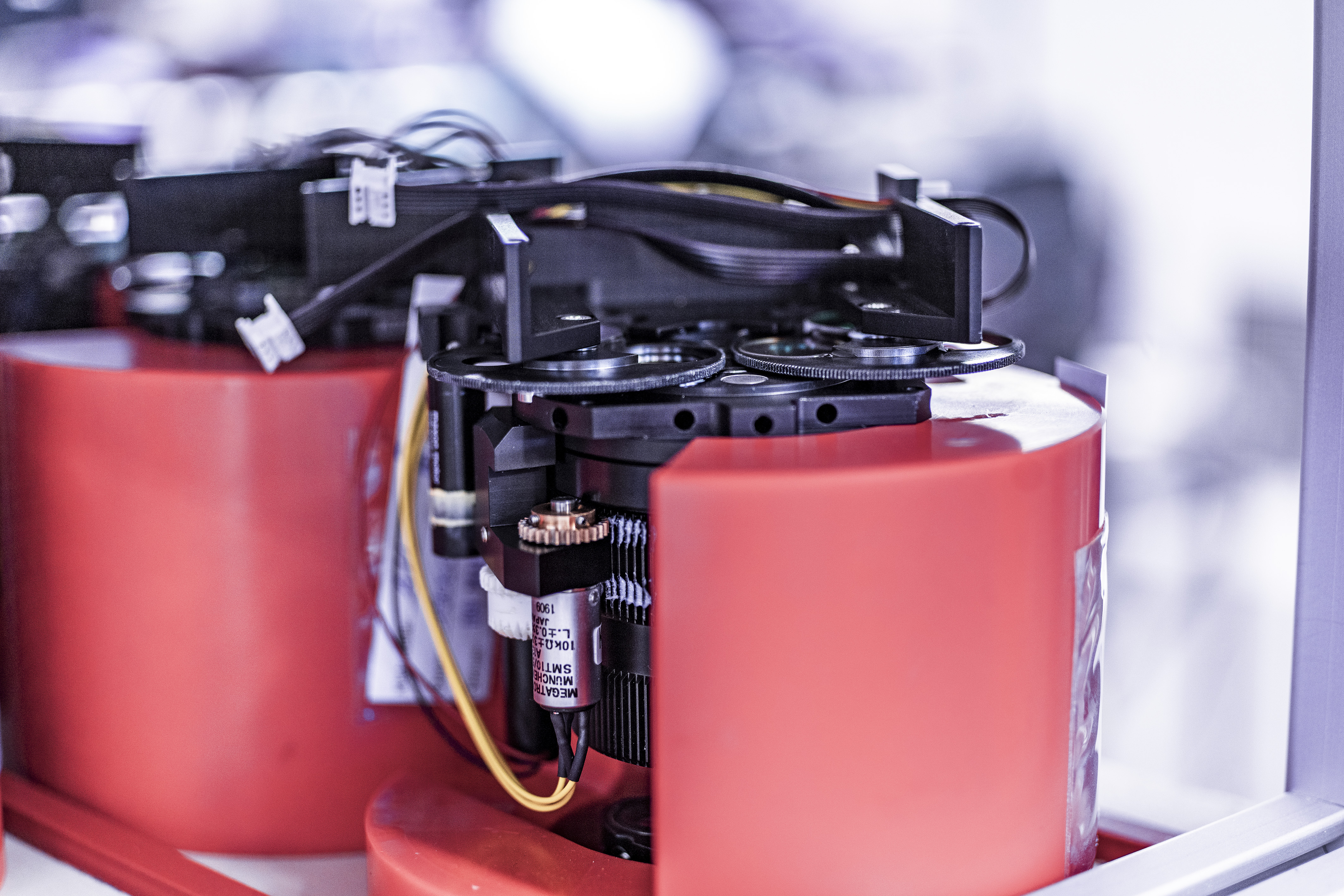
ZEISS KINEVO 900 interne Elektronik Close-up
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Auslegearm ohne Elektronik
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Stativ Detail
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Stativ blank Metall
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Auslegearm und Teil Stativ ohne Elektronik
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Kopf im finalen Test (Interna)
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
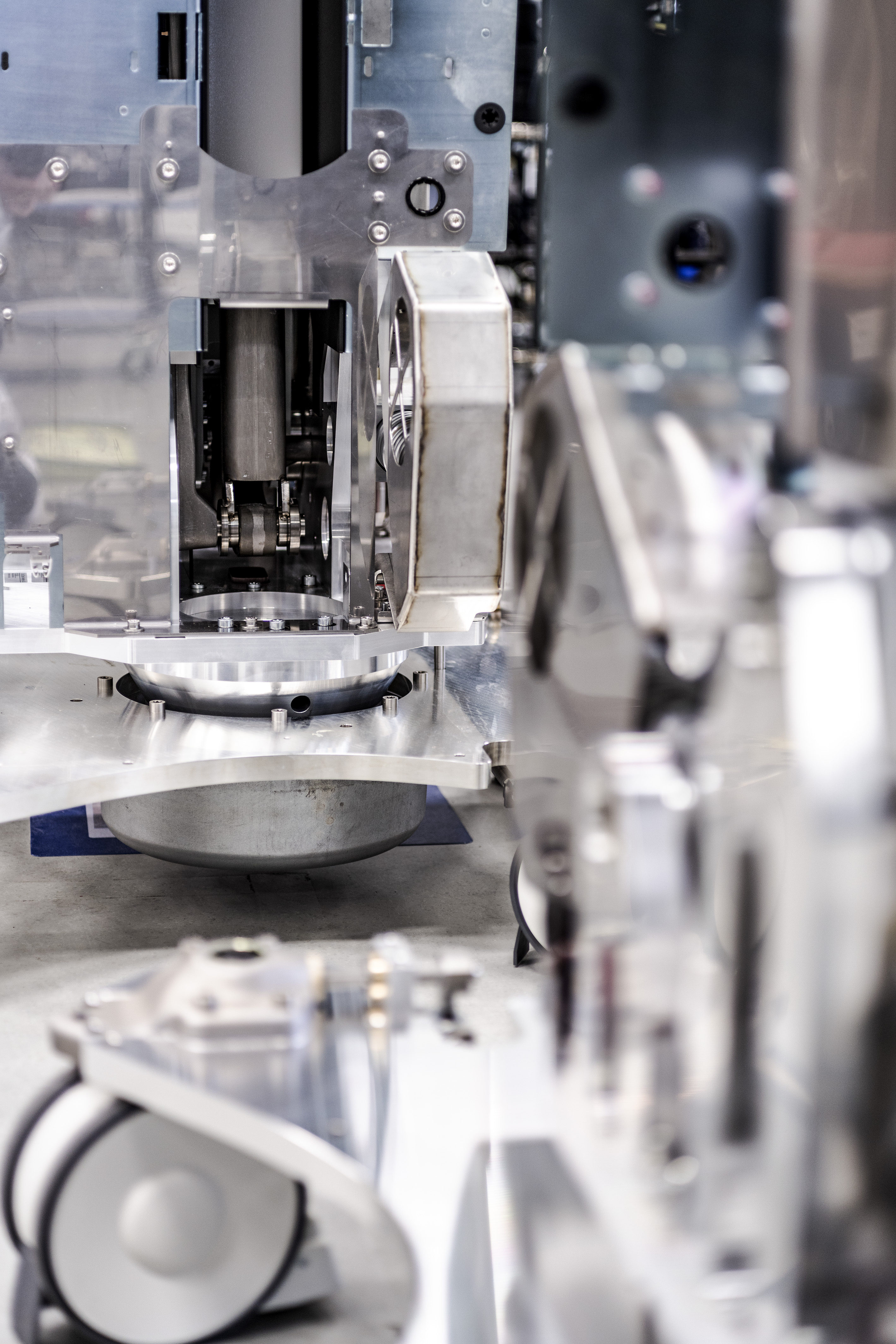
ZEISS KINEVO 900 Zoom System
Download link 300dpi
300dpi
JPEG · 5mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 Verkabelung / Robotik (Interna)
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 final vor Verpackung
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 final vor Verpackung (Zoom)
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
close
ZEISS KINEVO 900 im Aufbau
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
close
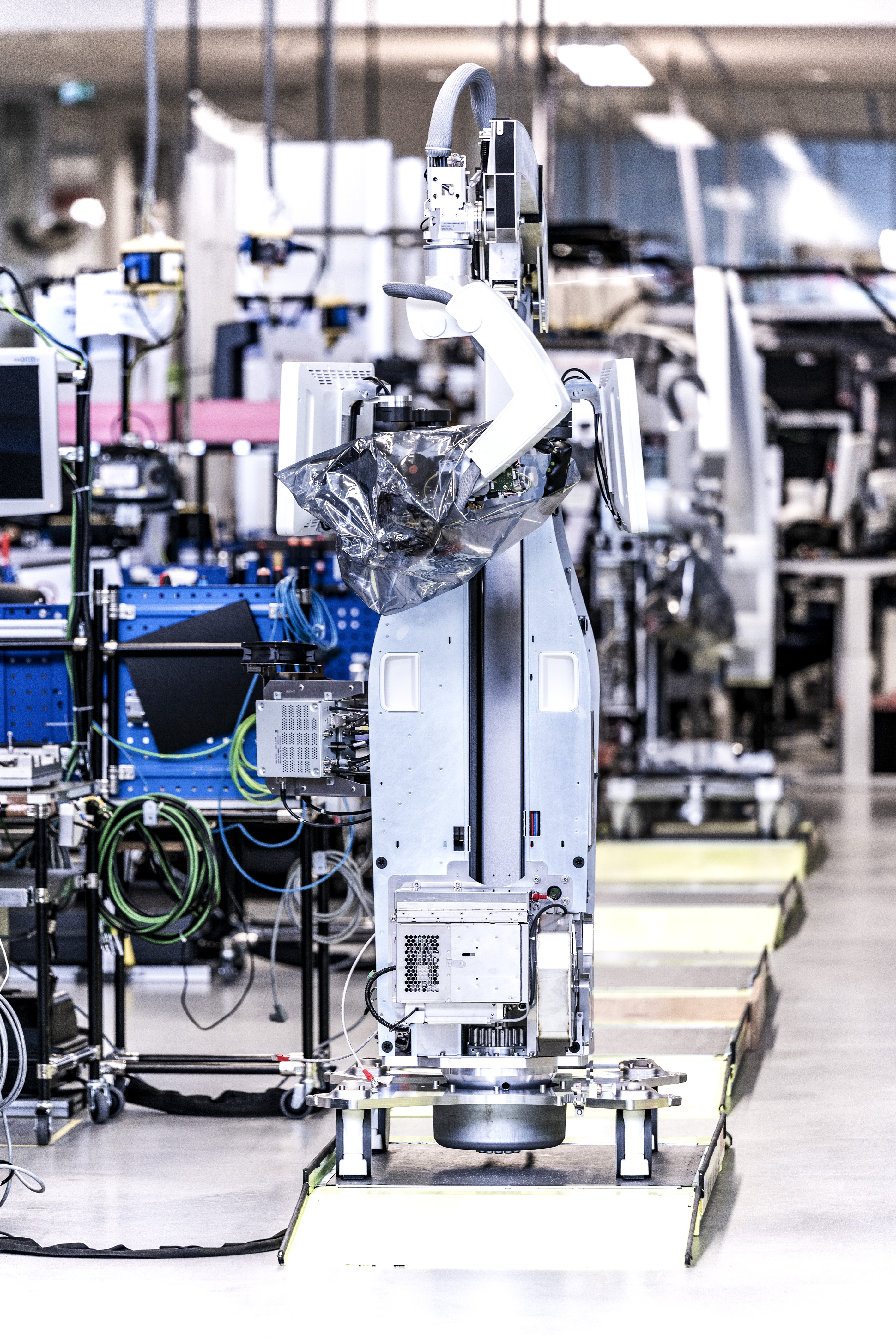
ZEISS KINEVO 900 Stativ mit interner Elektronik
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
 Gebärdensprache
Gebärdensprache
 Leichte Sprache
Leichte Sprache























































































































































 - Mundschalter als Modalität zur robotischen Steuerung")

 - Mundschalter als Modalität zur robotischen Steuerung")













")



 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

")

")

")
")


 – R&D im Hintergrund")









")


")



")




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}