Gebärdensprache
Leichte Sprache
English
EN
DZPWelt
Der Preis
schließen
Der Preis
Geleitwort
Förderer
Kuratorium
Jury
Statuten
Ausschreibung
Preisträger & Nominierte
Ausstellung
schließen
Ausstellung zum Deutschen Zukunftspreis im Deutschen Museum
Konzept
Aktuelle Ausstellung
Präsentation der preisgekrönten Projekte
Historie der Ausstellung
Besuch im Deutschen Museum
Downloads
schließen
Search
search input
DZPWelt
Der Preis
Geleitwort
Förderer
Kuratorium
Jury
Statuten
Ausschreibung
Preisträger & Nominierte
Ausstellung
Konzept
Aktuelle Ausstellung
Präsentation der preisgekrönten Projekte
Historie der Ausstellung
Besuch im Deutschen Museum
Downloads
Gebärdensprache
Leichte Sprache
Search
Bildmaterial
Team 2
Robotisches Visualisierungssystem – Effizienz für die Mikrochirurgie
Personen
Stills
Personen
Stills
Prof. Dr. med. Andreas Raabe
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
Dr.-Ing. Michelangelo Masini
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 782kb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 5mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
Frank Seitzinger, MBA
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
Das Team
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
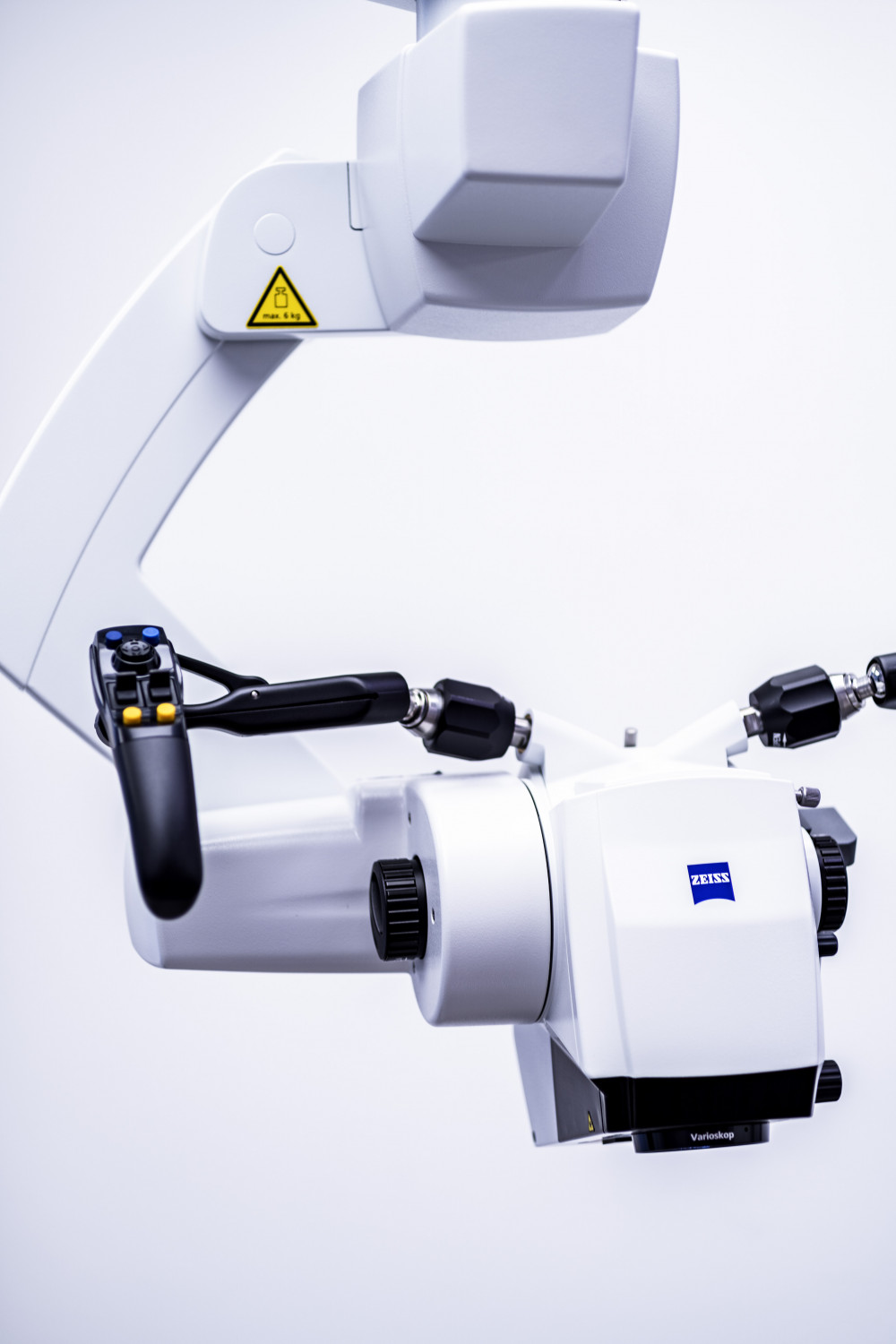
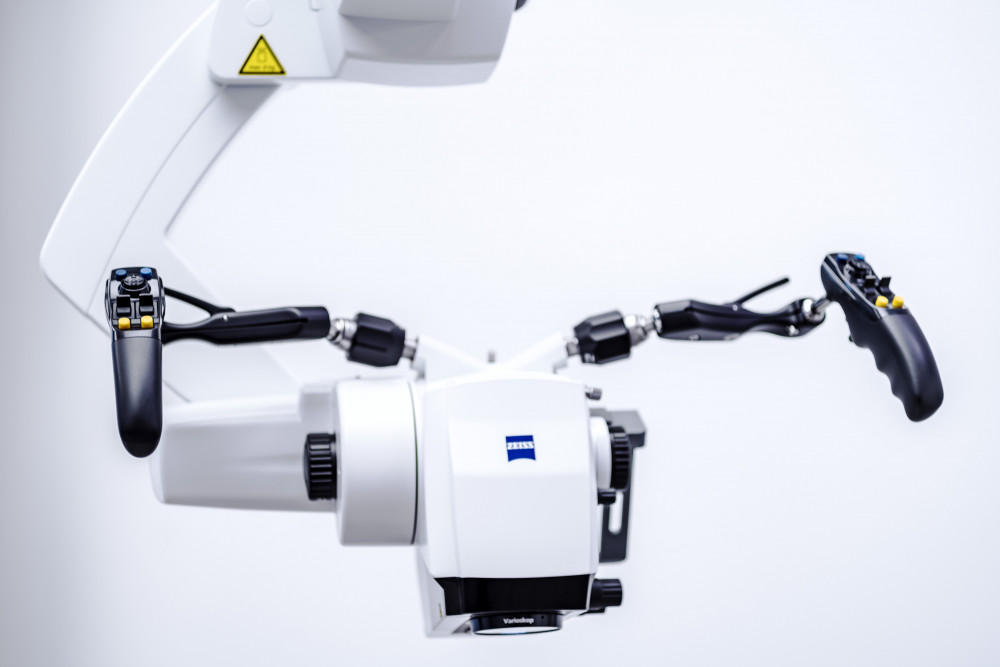
Atmosphärische Detailbilder zum Projekt
schließen
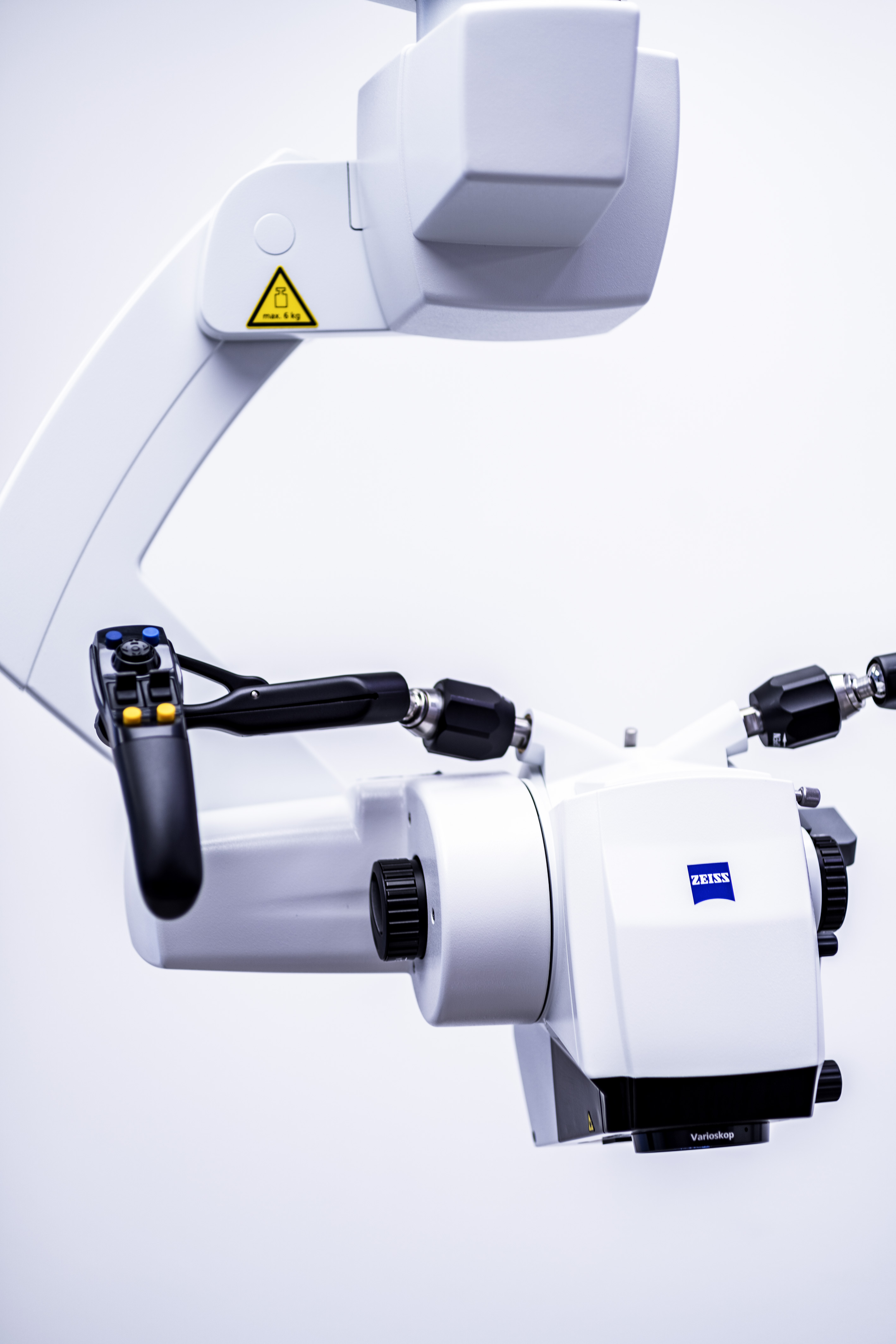
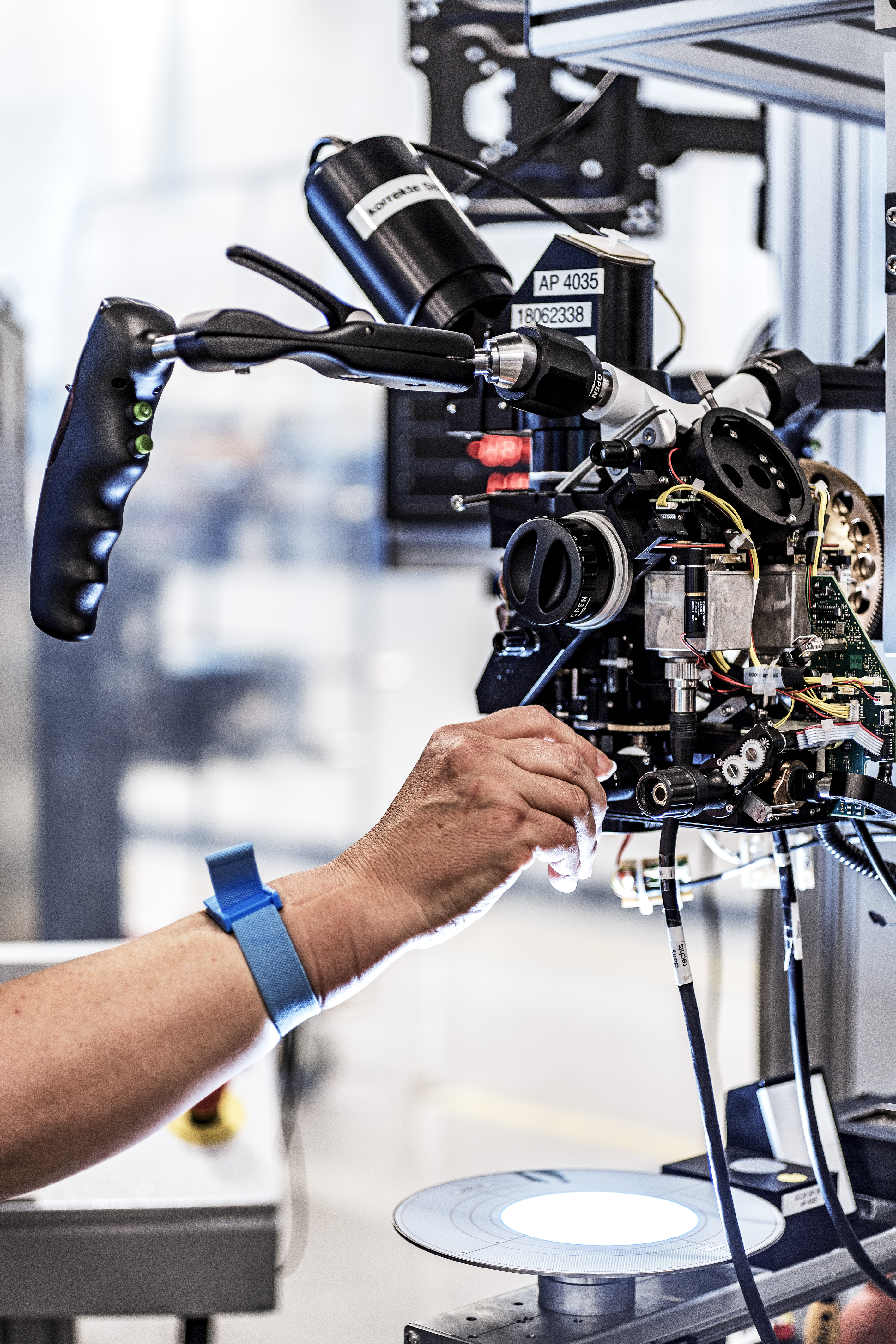
ZEISS QEVO Halter – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 in digitalem Set-up – Systemmonitore im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISSS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Chirurg in klassischem Set-up - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Chirurg in klassischem Set-up (frontal Zoom) - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
KINEVO 900 Chirurg in klassischem Set-up (frontal) - Mundschalter als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Prof. Raabe Hände unter ZEISS KINEVO 900
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
Prof. Raabe Hände unter ZEISS KINEVO 900
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
QEVO Chirurg – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS QEVO Chirurg – gewinkelter Handgriff zur Unterstützung der Applikation am Mikroskop
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 – klassischer Set-up, Chirurg im Hintergrund am Systemmonitor
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 – klassischer Set-up
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up inklusive robotischer Aufhängung (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
KINEVO 900 Kopf in digitalem Set-up (seitlich) – Augmentierung im Hintergrund
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 1mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (seitlich)
Download link 300dpi
300dpi
JPEG · 612kb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal)
Download link 300dpi
300dpi
JPEG · 772kb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up (frontal)
Download link 300dpi
300dpi
JPEG · 626kb
Download link 300dpi
300dpi
schließen
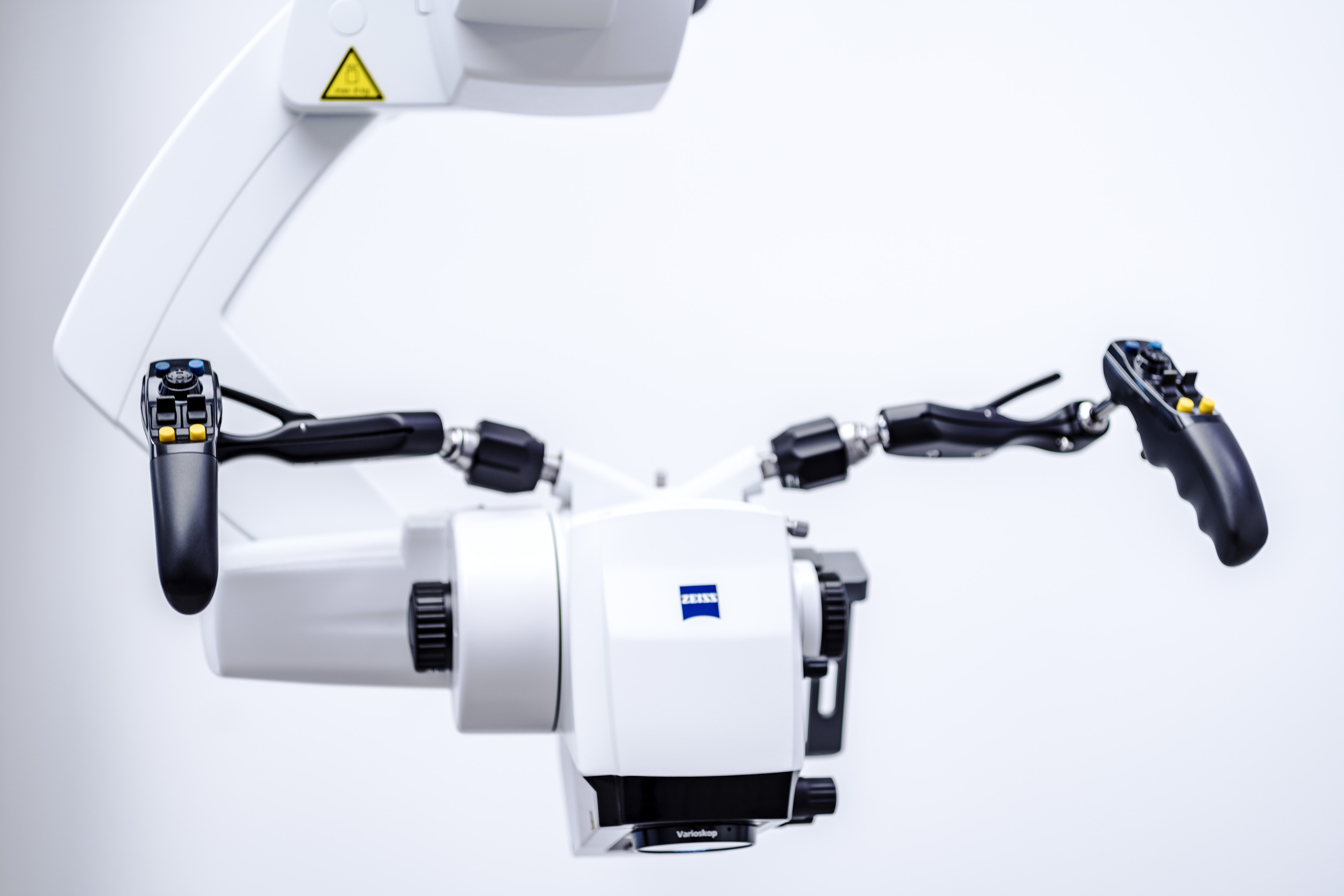
ZEISS KINEVO 900 Handgriff als Modalität zur robotischen Steuerung
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Kopf in digitalem Set-up mit Anschlüssen (seitlich) – R&D im Hintergrund
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
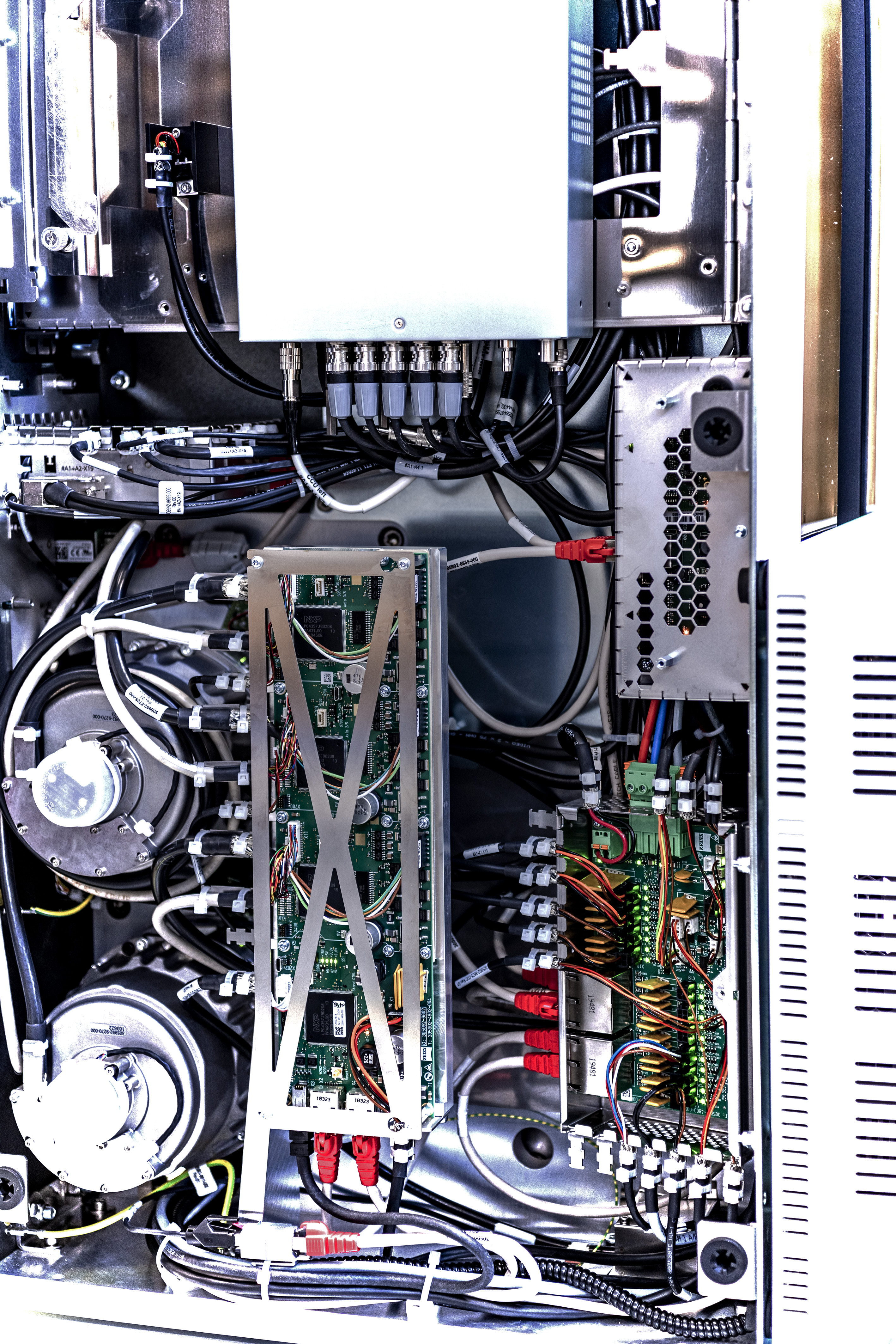
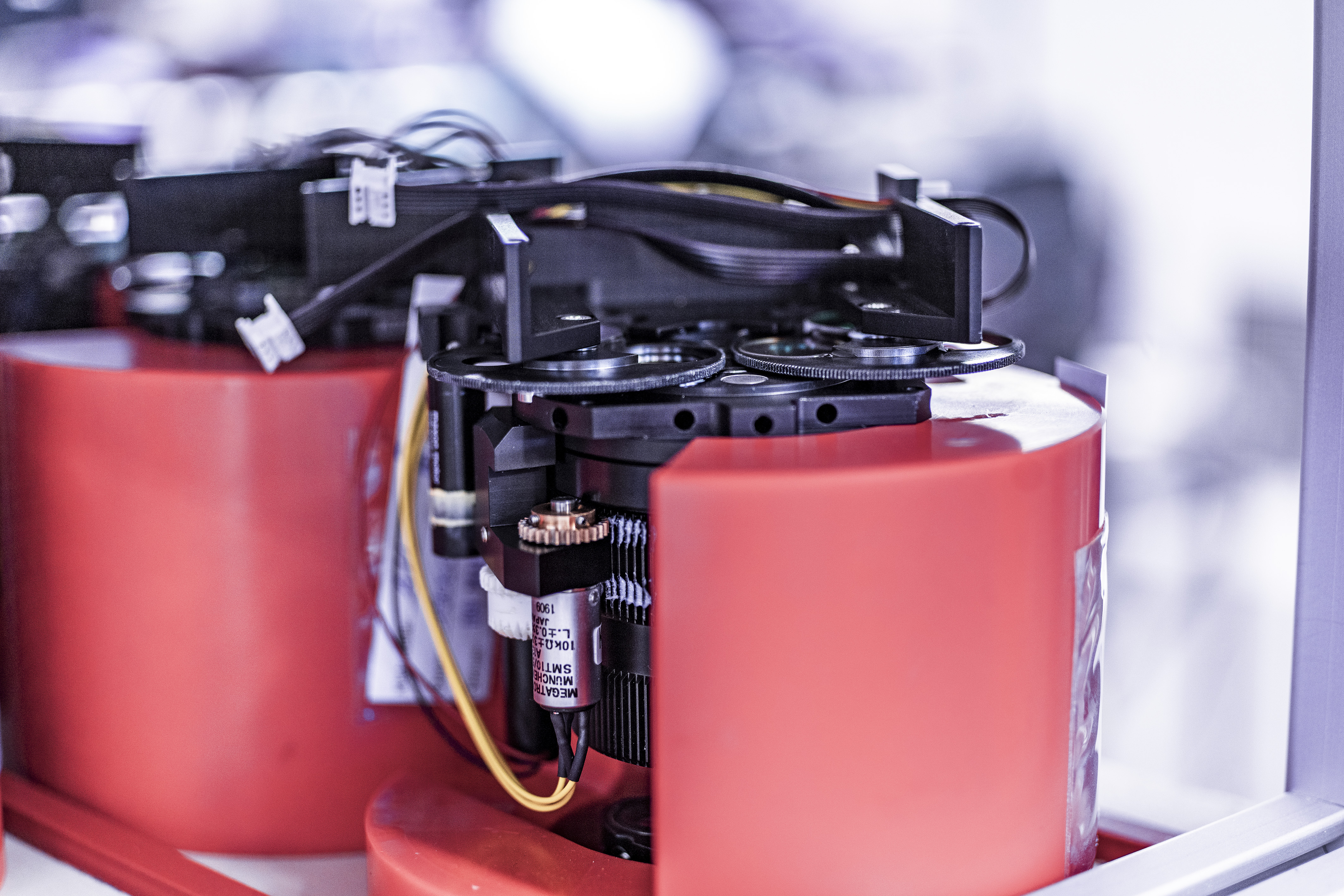
ZEISS KINEVO 900 interne Elektronik Close-up
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Auslegearm ohne Elektronik
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Stativ Detail
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Stativ blank Metall
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Auslegearm und Teil Stativ ohne Elektronik
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
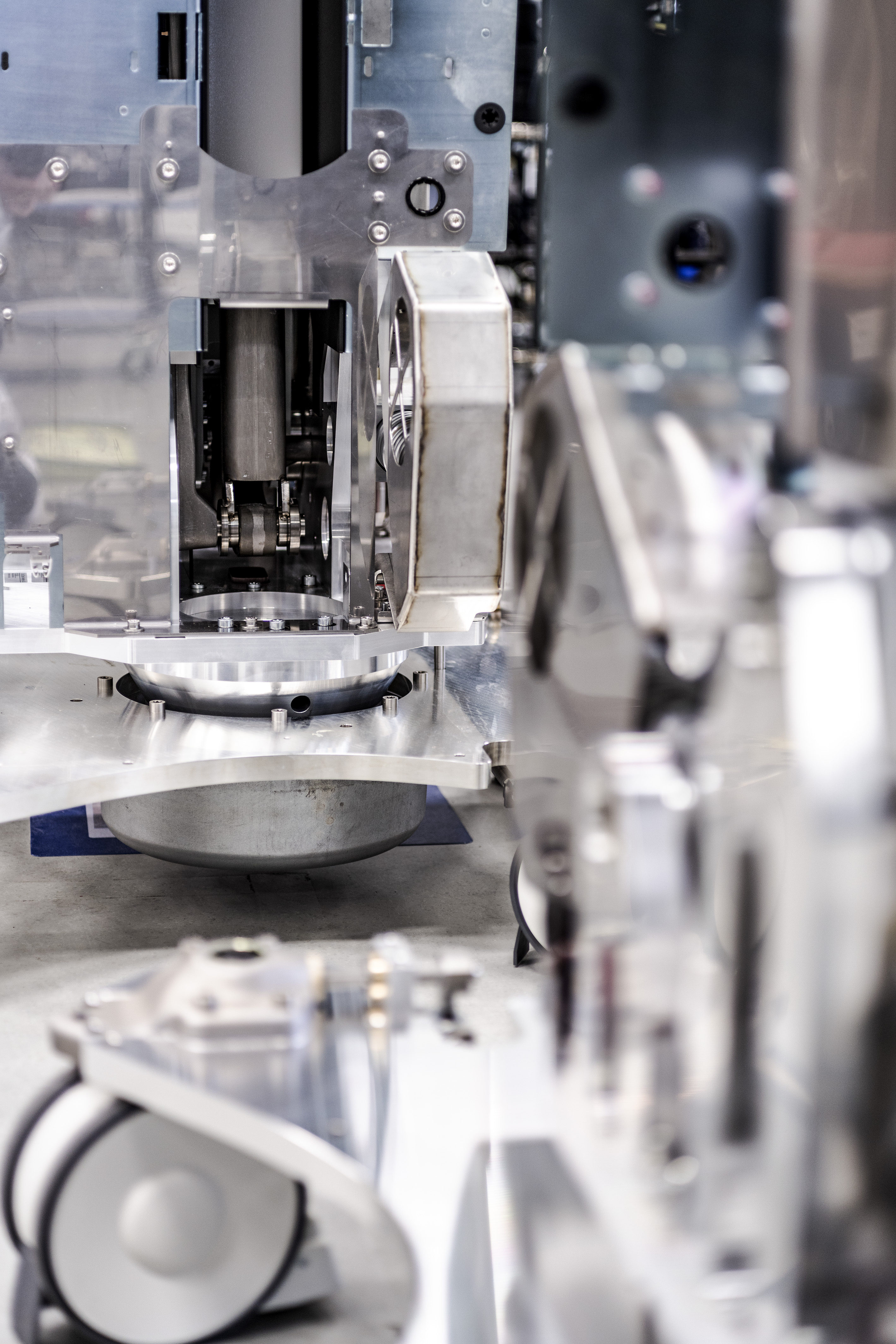
ZEISS KINEVO 900 Kopf im finalen Test (Interna)
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Zoom System
Download link 300dpi
300dpi
JPEG · 5mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Verkabelung / Robotik (Interna)
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 final vor Verpackung
Download link 300dpi
300dpi
JPEG · 2mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 final vor Verpackung (Zoom)
Download link 300dpi
300dpi
JPEG · 3mb
Download link 300dpi
300dpi
schließen
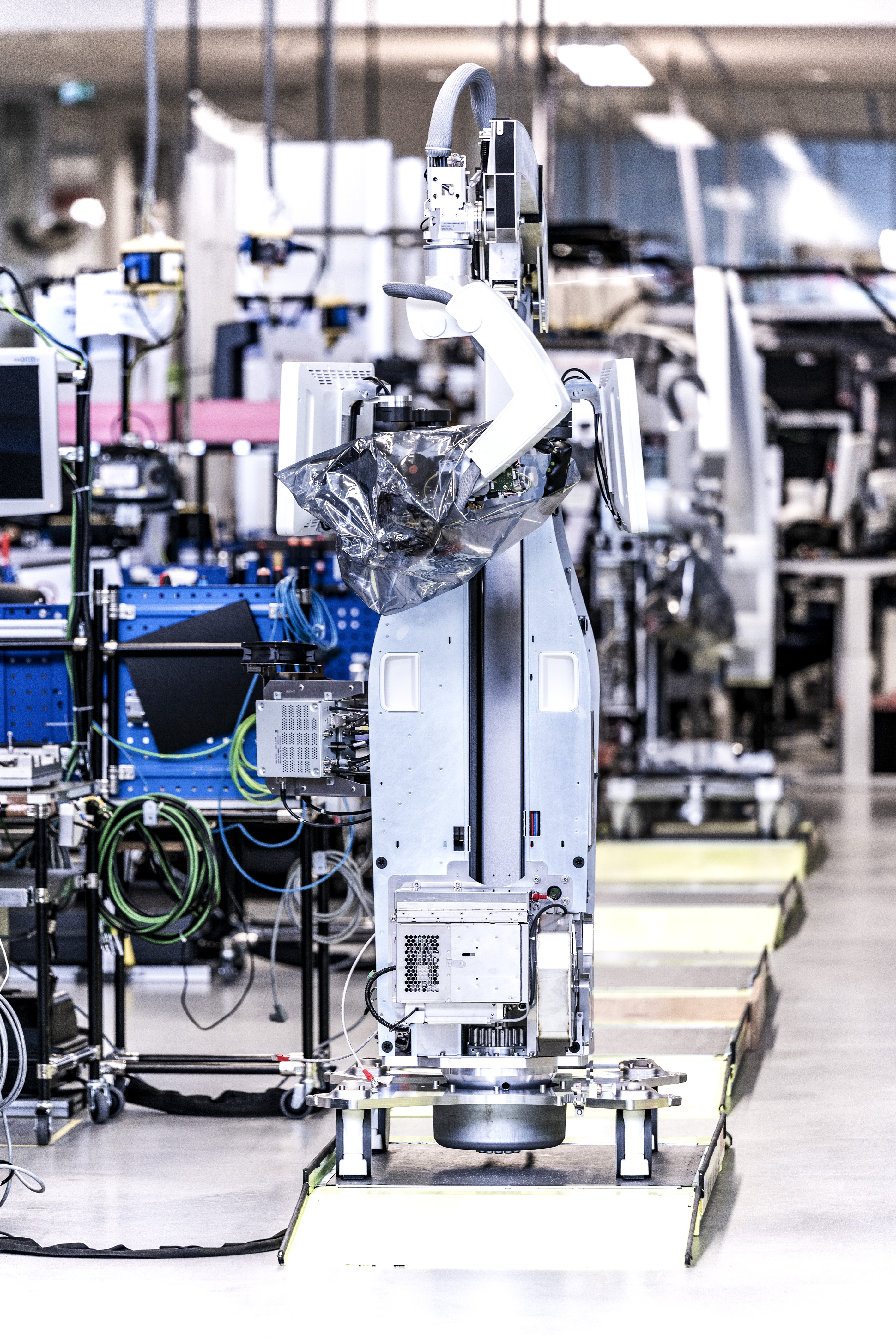
ZEISS KINEVO 900 im Aufbau
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
schließen
ZEISS KINEVO 900 Stativ mit interner Elektronik
Download link 300dpi
300dpi
JPEG · 4mb
Download link 300dpi
300dpi
 Gebärdensprache
Gebärdensprache
 Leichte Sprache
Leichte Sprache























































































































































 - Mundschalter als Modalität zur robotischen Steuerung")

 - Mundschalter als Modalität zur robotischen Steuerung")













")



 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

 – Augmentierung im Hintergrund")

")

")

")
")


 – R&D im Hintergrund")









")


")



")




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}