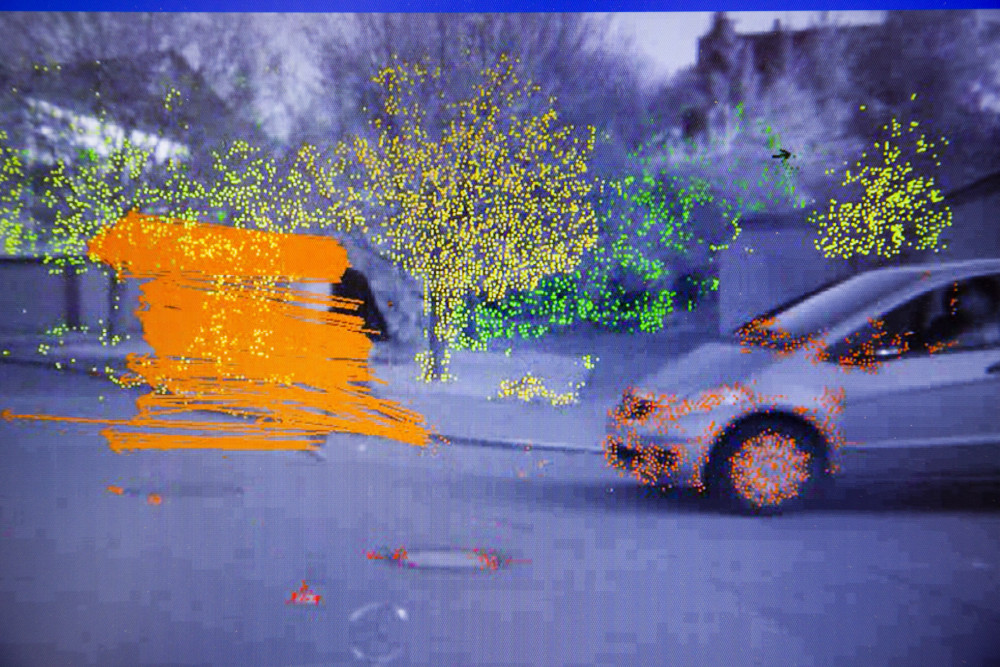
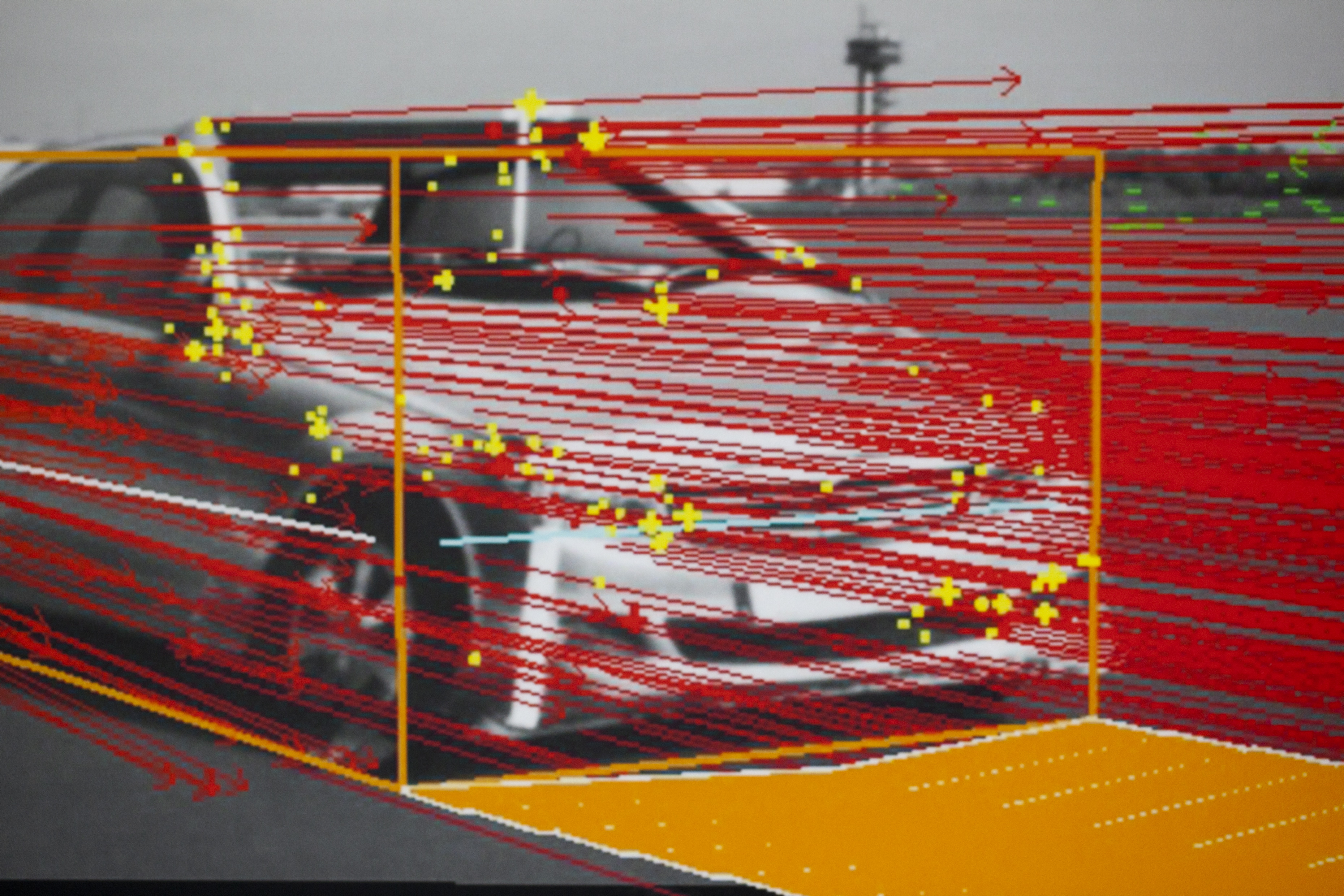
Visualisierung des 6D-Vision Algorithmus im Versuchsträger: Die Farbe kodiert die Entfernung der analysierten Punkte von Rot (2m) zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.
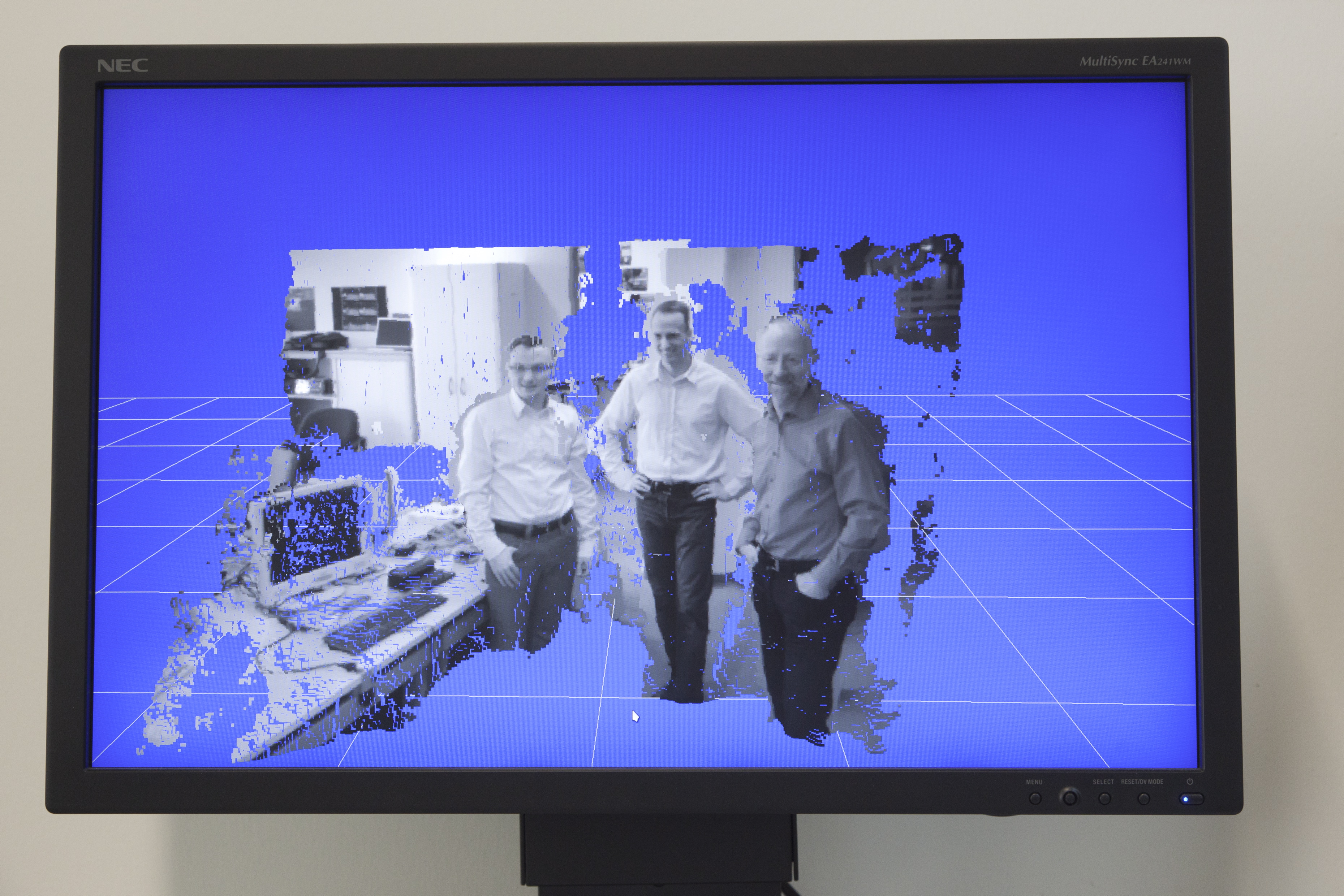
Visualisierung des 6D-Vision Algorithmus am Arbeitsplatz der Forscher. Die Farbe kodiert die Entfernung der analysierten Punkte von Rot (2m) zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.
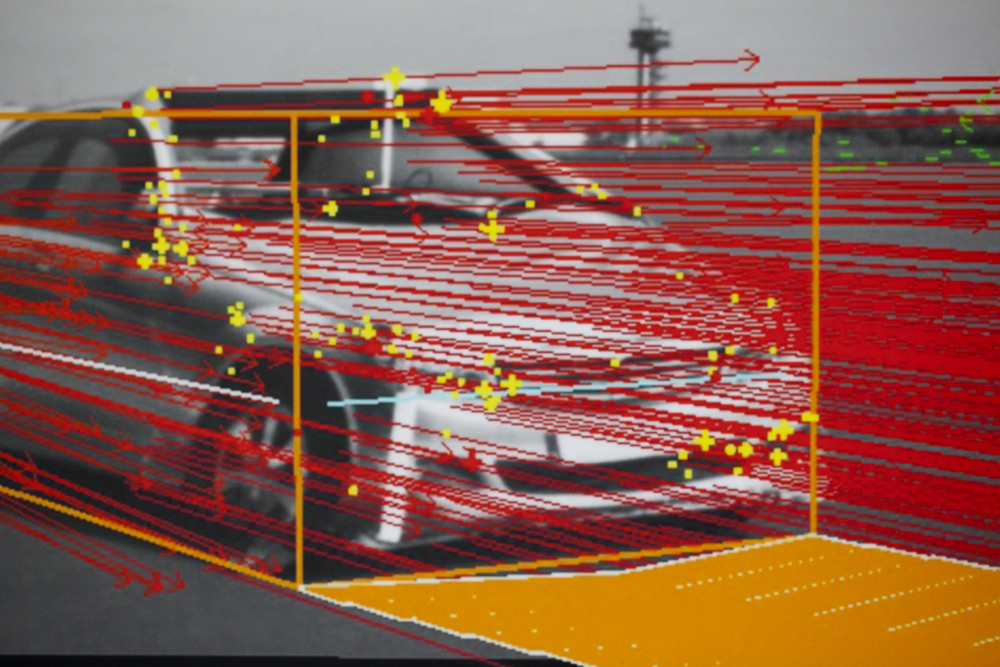
Objektdetektion auf Basis des 6D-Vision Algorithmus. Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden. Der erwartete Fahrkorridor des Fahrzeugs ist in Orange dargestellt.
Ergebnis des 6D-Vision Verfahrens: Die Farbe kodiert die Entfernung der analysierten Punkte von Rot (2m) zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.
Ergebnis des 6D-Vision Verfahrens: Die Farbe kodiert die Entfernung der analysierten Punkte von Rot (nah) über Gelb zu Grün (weit entfernt). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden. Von links nach rechts: Dr.-Ing. Clemens Rabe, Dr. rer. nat. Stefan Gehrig, Dr.-Ing. Uwe Franke.
Visualisierung des 6D-Vision Algorithmus im Versuchsträger: Die Farbe kodiert die Entfernung der analysierten Punkte von Rot (2m) zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.
 Gebärdensprache
Gebärdensprache
 Leichte Sprache
Leichte Sprache














































































































































 zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.")

 zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.")






 / Serienkamera")




 zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.")
 über Gelb zu Grün (weit entfernt). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden. Von links nach rechts: Dr.-Ing. Clemens Rabe, Dr. rer. nat. Stefan Gehrig, Dr.-Ing. Uwe Franke.")

 zu Grün (50m). Die Pfeile zeigen auf die prädizierte Position in 0,5 Sekunden.")

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}